数据可视化
3D 手部可视化
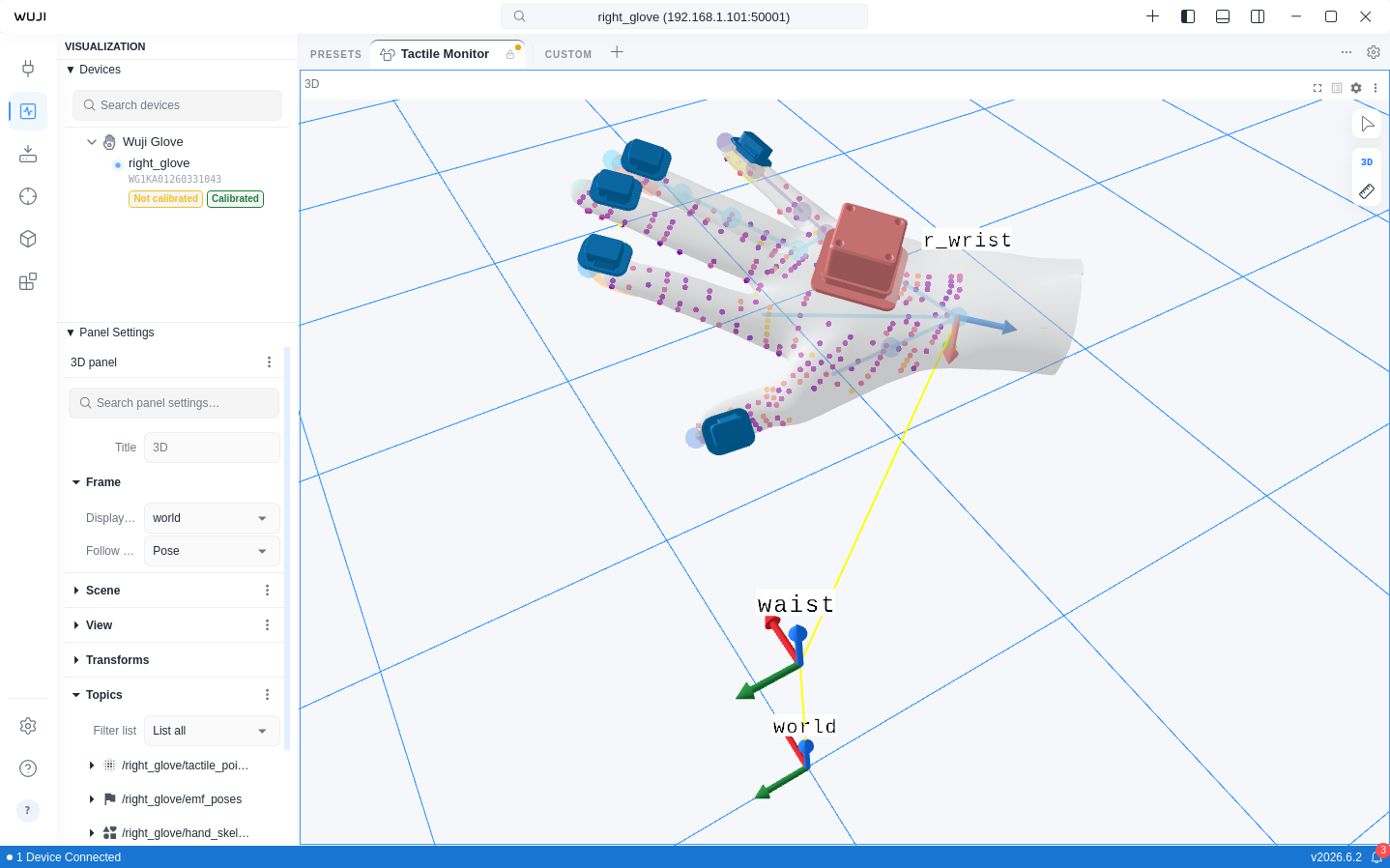
3D 面板用于在三维空间中实时渲染手部追踪和传感器数据,延迟通常小于 10ms。它包含三类核心可视化组件,以及触觉点云和坐标变换显示。
| 组件 | 图示 | 说明 |
|---|---|---|
| 手骨架 |  | 21 个 MediaPipe 关键点和骨骼连接,支持单指置信度着色 |
| 指尖姿态 |  | 5 个指尖的位置和朝向,以子弹头几何体渲染 |
| EMF 姿态 |  | 电磁追踪发射/接收线圈,支持置信度着色 |
| 触觉点云 |  | 触觉传感器压力数据以彩色点云渲染 |
| TF 坐标变换 |  | 静态和动态坐标变换显示 |
手骨架 (hand skeleton)
手骨架组件渲染 21 个 MediaPipe 标准关键点及其连接关系:
- 关节点:以球体渲染,分布在拇指(4 个)、食指(4 个)、中指(4 个)、无名指(4 个)、小指(4 个)和手腕(1 个)
- 骨骼连接:以圆柱体渲染 21 条连接线,呈现手部拓扑结构
- 手部网格:默认叠加一层半透明实心手部网格,与骨架同步动态变形。可在设置中切换为线框或关闭
每个关节的颜色反映该手指的追踪置信度,通过 Color Map 映射实现。
可配置项:
| 设置 | 默认值 | 说明 |
|---|---|---|
| Color Map | Safety | 颜色映射方案 |
| Invert Colors | 是 | 反转色彩映射方向 |
| Opacity | 0.9 | 不透明度,1.0 为完全不透明 |
| Point size | 5 mm | 关节球体大小 |
| Line scale | 0.3 | 骨骼线宽缩放 |
| Show Axis | 可开关 | 显示每个关节的坐标轴 |
| Hand Profile | wujihand | 手型 profile,可选 wujihand、wujihand2 或 Custom URDF |
| Custom URDF Path | — | 本地 URDF 绝对路径,选择 Custom URDF 后显示,供 SDK 端 IK 解算使用 |
| Show Mesh | 是 | 叠加实心手部网格 |
| Mesh Opacity | 0.5 | 网格不透明度 |
| Mesh Wireframe | 否 | 切换为线框模式 |
| Mesh Color | #cccccc | 网格基础颜色 |
指尖姿态 (fingertip poses)
指尖姿态组件独立于手骨架,渲染 5 个指尖的位置和朝向:
- 几何体:定制的子弹头形状(椭圆体尖端 + 圆柱体延伸)
- 坐标系:Z 轴指向手腕方向,X 轴从小指到拇指方向,Y 轴指向手背侧
- 支持独立开关,可与手骨架同时或单独使用
可配置项:
| 设置 | 默认值 | 说明 |
|---|---|---|
| Color Map | Safety | 颜色映射方案 |
| Invert Colors | 是 | 反转色彩映射方向 |
| Opacity | 0.9 | 不透明度,1.0 为完全不透明 |
| Point size | 5 mm | 指尖几何体大小 |
| Min Value / Max Value | 0.0 / 1.0 | 色彩映射的值域范围 |
| Show Axis | 可开关 | 显示指尖坐标轴 |
| Axis scale | 0.02 | 坐标轴长度 |
EMF 姿态 (EMF poses)
EMF 姿态组件可视化电磁追踪系统的发射和接收线圈:
- 发射线圈:渲染在 EMF 坐标原点
- 接收线圈:渲染在每个手指的 EMF 传感器位置
- 传感器外观:默认按真实 STL 模型渲染,可在设置中切换为立方体
- 颜色反映定位置信度,置信度越高颜色越接近映射的"好"端
- 在 Sidebar 的 Panel 中通过 Color Map 下拉菜单切换配色方案,默认使用 Safety (Okabe-Ito) 无障碍配色,是 3D 可视化的推荐选择
可配置项:
| 设置 | 默认值 | 说明 |
|---|---|---|
| Color Map | Safety | 颜色映射方案 |
| Invert Colors | 是 | 反转色彩映射方向 |
| Opacity | 0.7 | 不透明度,1.0 为完全不透明 |
| Sensor visual | STL | 传感器渲染模式(STL / Cube) |
| Min Value / Max Value | 0.80 / 0.92 | 置信度映射范围 |
| Show Axis | 可开关 | 显示 EMF 坐标轴 |
| Transfer Function | — | 传递函数类型 |
| Gamma (γ) | 可调 | Gamma 传递函数(0.1–3.0) |
| EXP (k) | 可调 | 指数传递函数(0.1–10.0) |
触觉点云 (point cloud)
将触觉传感器数据在 3D 空间中以点云形式渲染,每个点的颜色反映压力值。在 Sidebar 的 Panel 中切换配色方案和调整色彩映射参数。
TF 坐标变换 (TF coordinate transforms)
3D 视图支持 TF(Transform)坐标变换显示。在 Sidebar 的 Panel 中展开 Transforms 查看坐标变换树,包含静态变换(tf_static)和动态变换。
为每个变换配置固定偏移值,或订阅 Topic 实时更新。
全局 Topic
tf 和 tf_static 是全局 Topic——无需设备名称前缀即可直接订阅。连接多台设备时,各设备的变换树自动合并为统一的变换树,两只手可同时显示在同一 3D 视图中。设备固件自动为左手和右手坐标系分配 l_ 和 r_ 前缀。