ROS2 使用说明
快速开始
启动驱动
# 加载 ROS2 环境,替换 <distro> 为实际安装的 ROS2 发行版
source /opt/ros/<distro>/setup.bash
# 如使用源码编译,请叠加工作空间(Deb 包安装可跳过)
# 将 <workspace> 替换为实际工作空间路径,如 ~/wujihandros2
source <workspace>/install/setup.bash
# 启动驱动
ros2 launch wujihand_bringup wujihand.launch.py启动成功后会看到以下输出:
[wujihand_driver]: Connected to WujiHand (right)
[wujihand_driver]: WujiHand driver started (state: 1000.0 Hz, diagnostics: 10.0 Hz)验证运行状态
打开新终端,查看关节状态:
# 加载 ROS2 环境,替换 <distro> 为实际安装的 ROS2 发行版
source /opt/ros/<distro>/setup.bash
# 如使用源码编译,请叠加工作空间(Deb 包安装可跳过)
# 将 <workspace> 替换为实际工作空间路径,如 ~/wujihandros2
source <workspace>/install/setup.bash
ros2 topic echo /hand_0/joint_states --once运行演示
# 波浪演示:手指依次弯曲伸展
ros2 run wujihand_bringup wave_demo.py连接多只灵巧手时,需通过 --ros-args -p hand_name:=<hand-name> 指定目标手。详见多手配置。
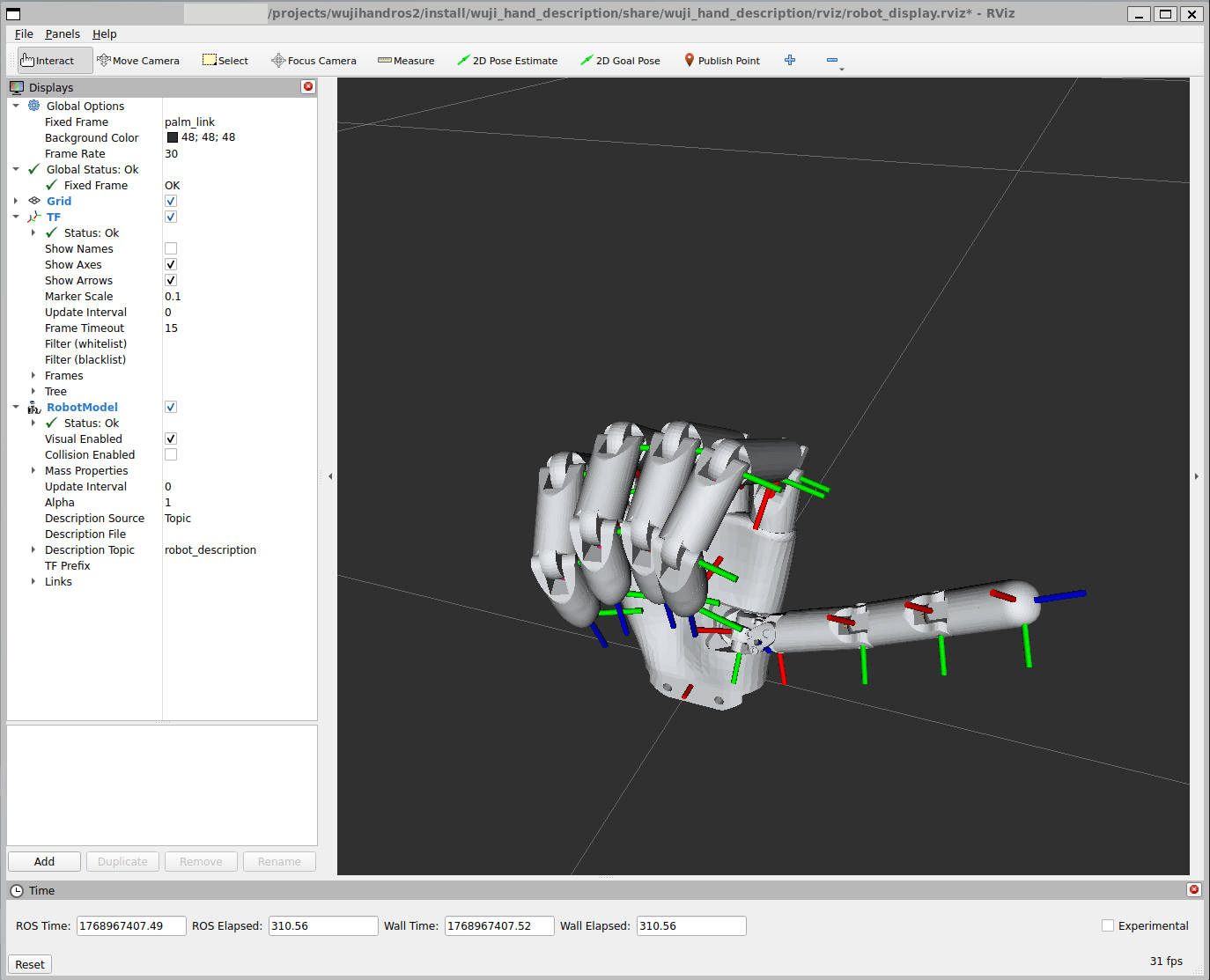
启动 RViz 可视化
ros2 launch wujihand_bringup wujihand.launch.py rviz:=true运行效果