产品介绍
1. 产品概述
Wuji Hand 是舞肌科技 (WUJI TECH) 研发的一款具有 20 主动自由度的仿生灵巧手,面向科研实验、机器人集成、人机交互等多种应用场景。
2. 产品参数
Wuji Hand 核心技术参数表涵盖结构设计、驱动控制、负载性能、动态响应和电气特性,供产品选型、仿真建模和应用集成参考。
| 参数分类 | 参数项 | 典型数值或描述 |
|---|---|---|
| 结构与自由度 | 主动自由度 | 20,每指 4 个 |
| 关节数量 | ||
| 抓指构型 | 可全对指,支持侧摆 | |
| 运动学构型 | 旋转关节串联直驱,无非线性运动学关系 | |
| 最大抓握直径 | 100 mm | |
| 尺寸与重量 | 自重(不含线缆) | 580 ± 10 g |
| 尺寸 | 201 mm × 75 mm × 50 mm | |
| 驱动方式 | 驱动方式 | 自锁旋转直驱关节 |
| 控制算法 | FOC 矢量控制驱动 | |
| 控制与通信 | 控制频率 | 1000 Hz × 20 轴 |
| 通信接口 | USB 2.0 | |
| 控制模式 | 位控 | |
| 通信协议 | 自研协议 | |
| 通信速率 | 480 Mbps(理论值) | |
| 负载性能 | 指尖力 | 15 N |
| 单指最大载荷(钩握) | 3 kg | |
| 整手抓握最大静载 | 10 kg | |
| 整手钩握最大静载 | 10 kg | |
| 整手竖抓最大静载 | 5 kg | |
| 挂握最大重量 | 5 kg | |
| 动态性能 | 最小开合时间 | ≈ 0.3 s |
| 重复开合速度 | ≥ 2 times/s | |
| 拇指弯曲/侧摆速度 | ≥ 100 rpm | |
| 四指弯曲速度 | ≈ 0.25 s | |
| 精度与寿命 | 重复定位精度 | ± 1 mm |
| 空载抓握寿命 | ≥ 300,000 次 | |
| 背隙 | ≤ ± 7 mm | |
| 电气性能 | 工作电压 | 12V - 20V DC |
| 静态功耗 | 12 W | |
| 标配适配器规格 | 额定输出:12V 20A | |
| 材料与防护 | 外壳材质 | 铝合金 |
| 防护等级 | IP40 |
3. 产品结构特征
本节介绍 Wuji Hand 整体结构设计、通信与电源接口布局,以及各自由度的命名规则与运动参数,帮助用户了解产品的机械结构与使用规范。
3.1 结构示意图
Wuji Hand 采用五指仿生结构设计,每个手指包含多个关节实现灵活运动。下图展示整体结构及主要组成部分:
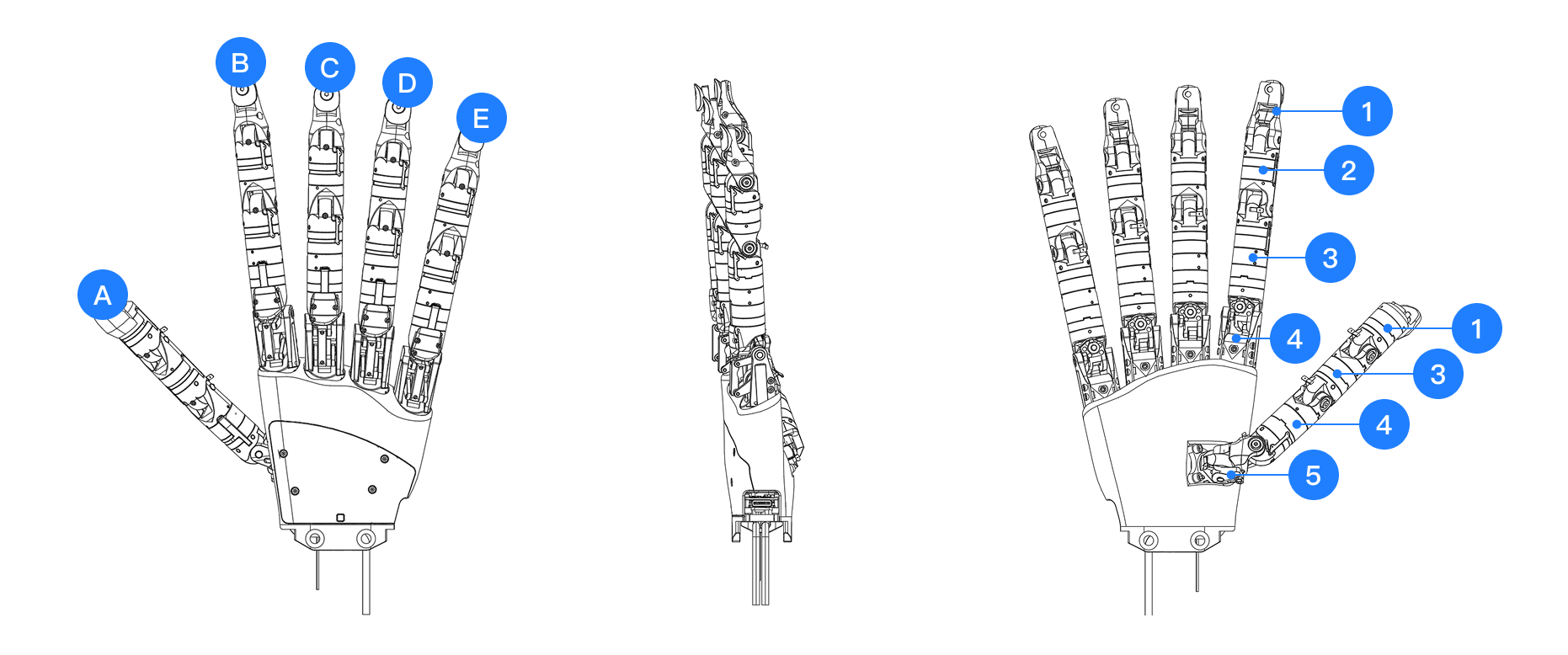
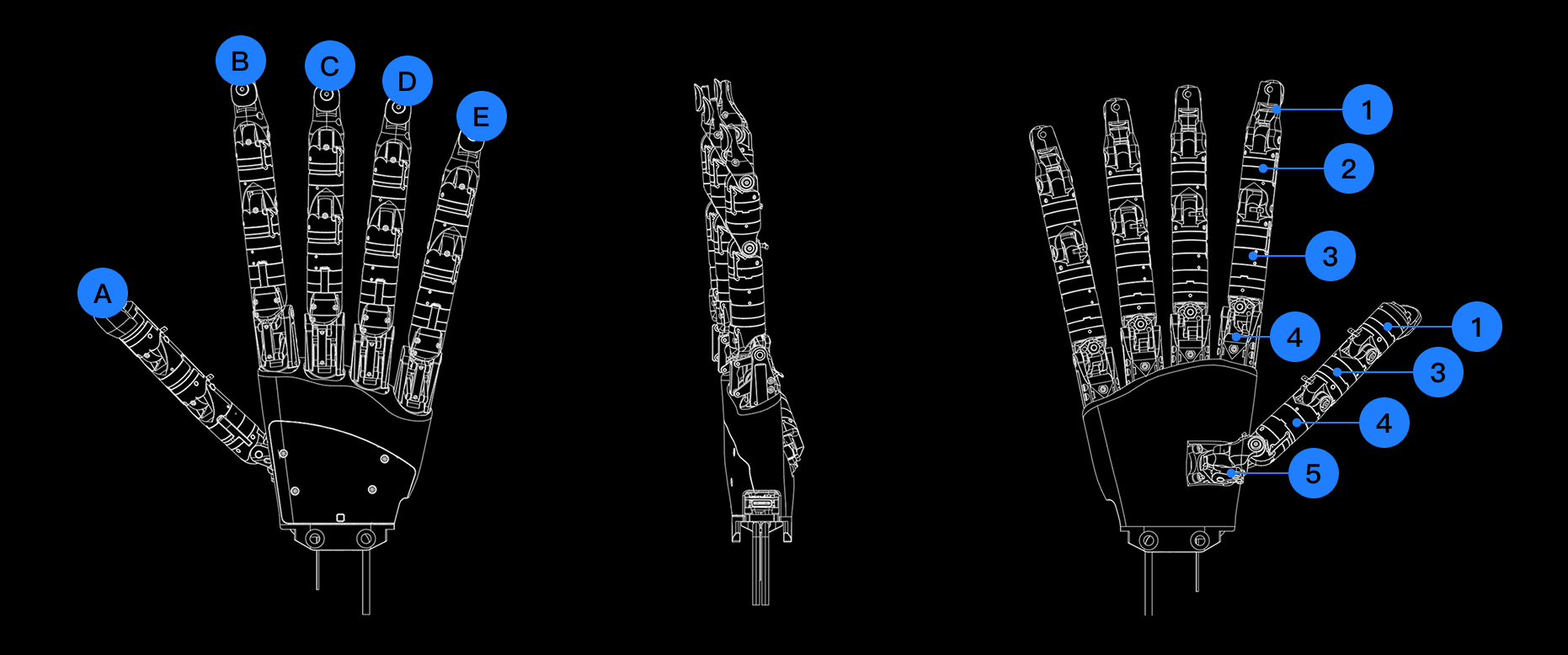
- 图中 A~E 分别对应:
- A:拇指 (Thumb)
- B:食指 (Index)
- C:中指 (Middle)
- D:无名指 (Ring)
- E:小指 (Little)
- 图中 1~5 对应手部常用的解剖学区域标识:
- 1:远节指骨 (Distal phalanges)
- 2:中节指骨 (Intermediate phalanges)
- 3:近节指骨 (Proximal phalanges)
- 4:掌骨 (Metacarpals)
- 5:腕骨 (Carpals)
3.2 Wuji Hand 自由度配置
下图为 Wuji Hand 各关节的解剖学命名与对应位置关系,便于用户理解各自由度的功能定位。
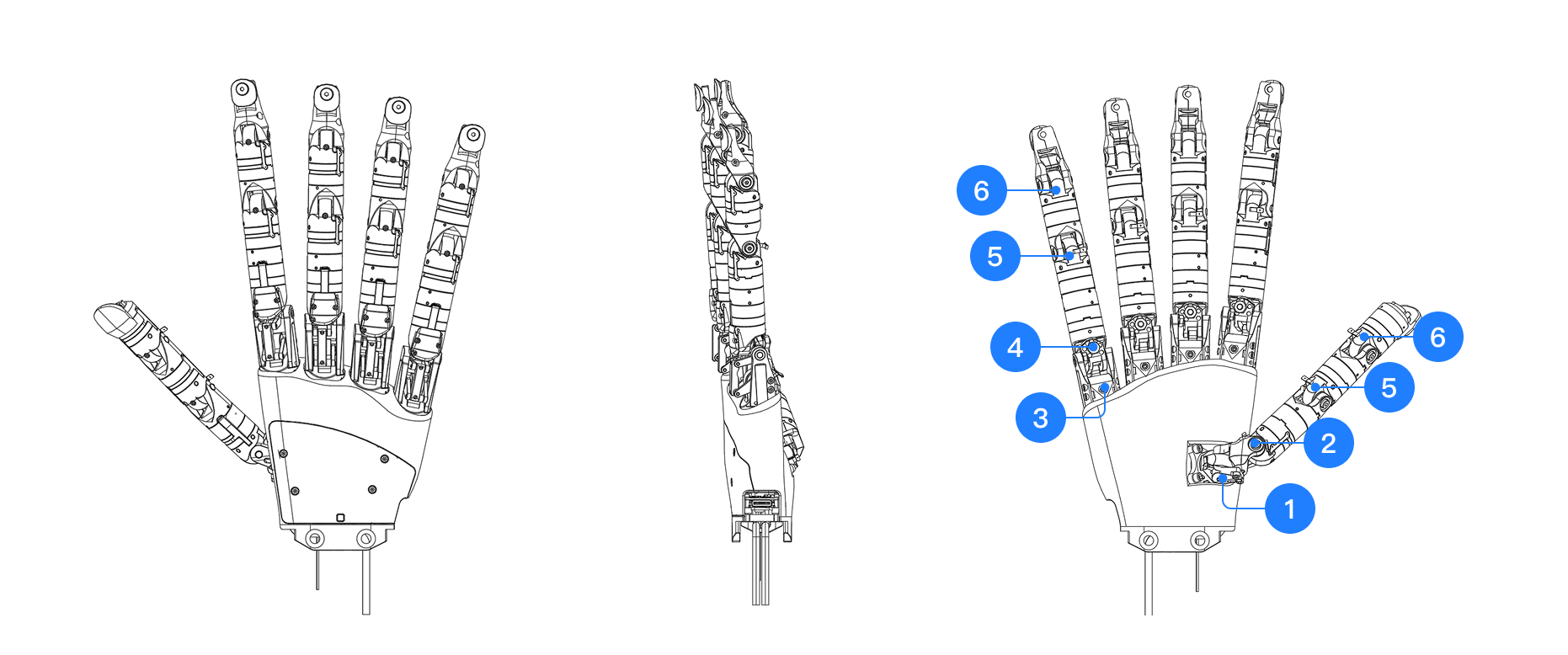
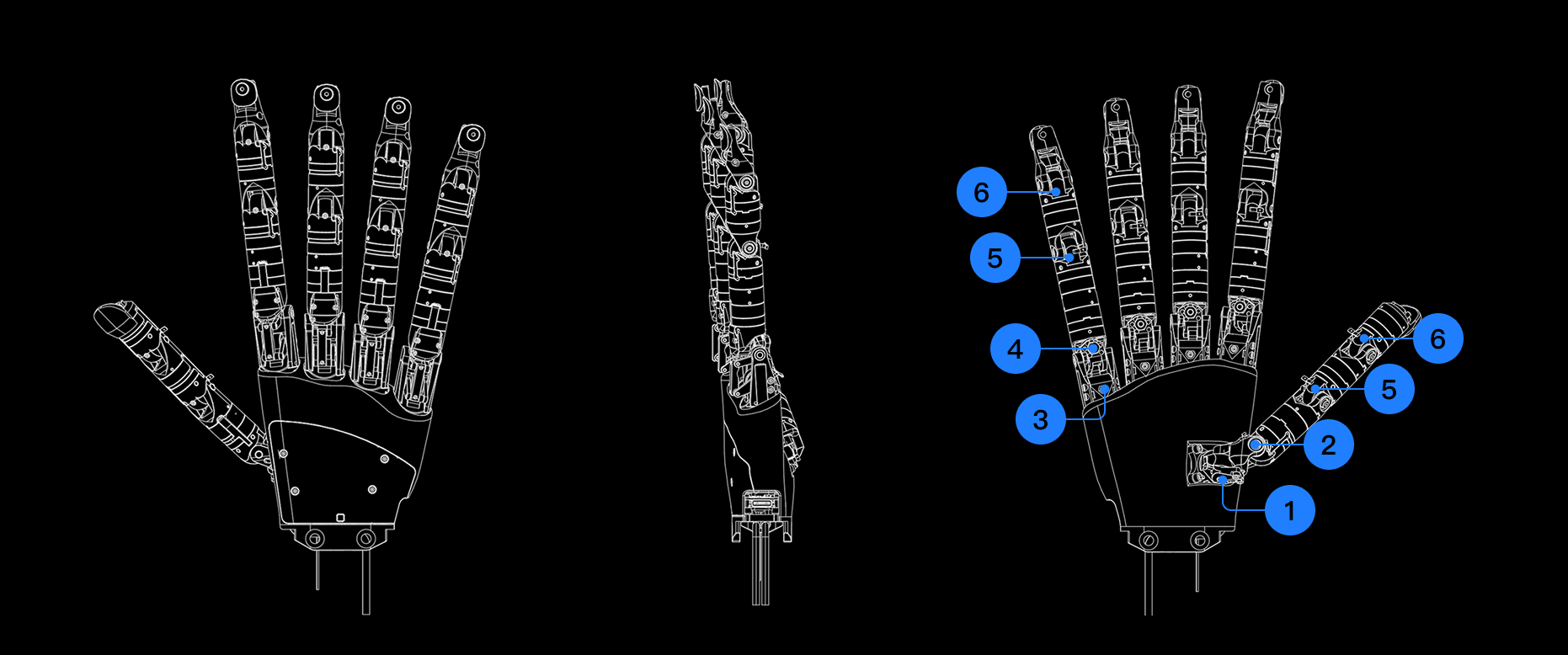
图中 1~6 分别对应:
- 1:CMC1
- 2:CMC2
- 3:MCP1
- 4:MCP2
- 5:PIP
- 6:DIP
3.3 各自由度运动方向及角度范围
四指结构一致,单指全长约 157 mm;拇指模块结构略有差异,单指全长约 130 mm。下图以拇指和小指为例,说明各自由度的运动方向及角度范围:
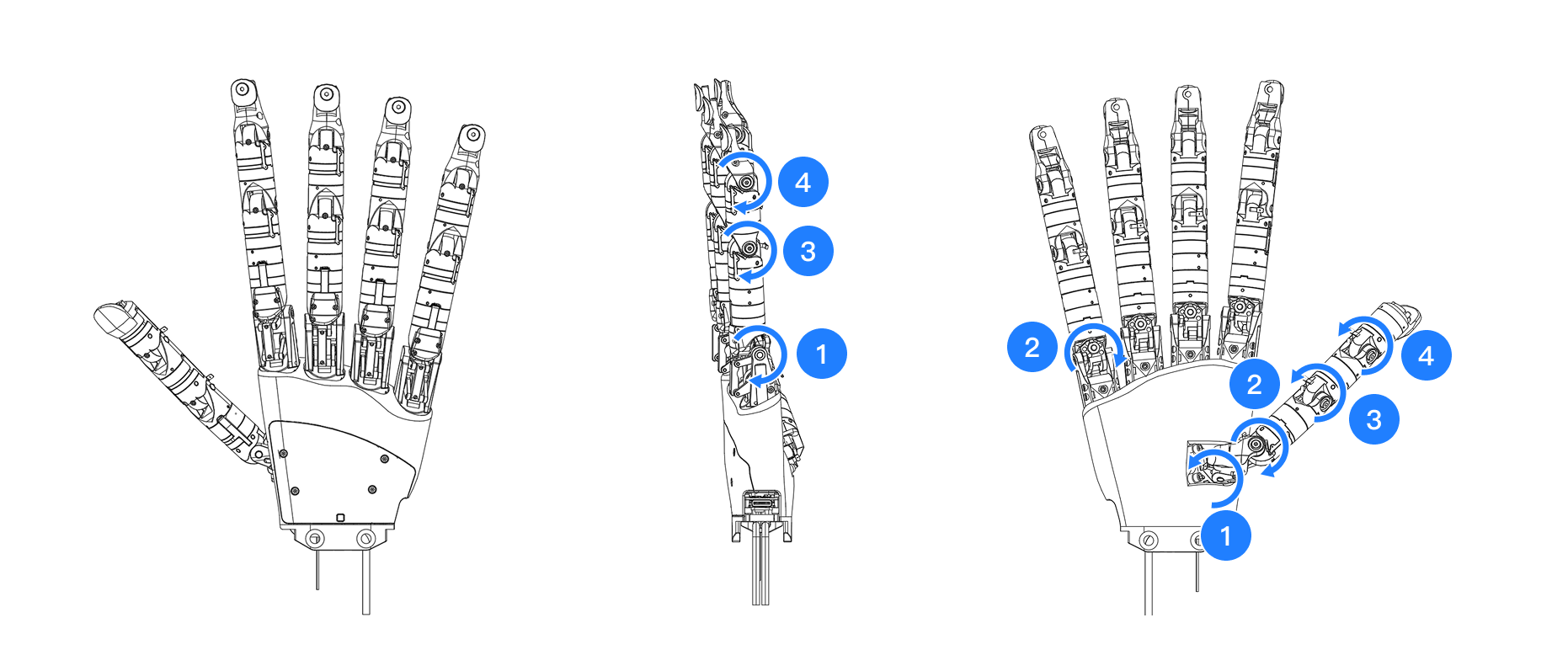
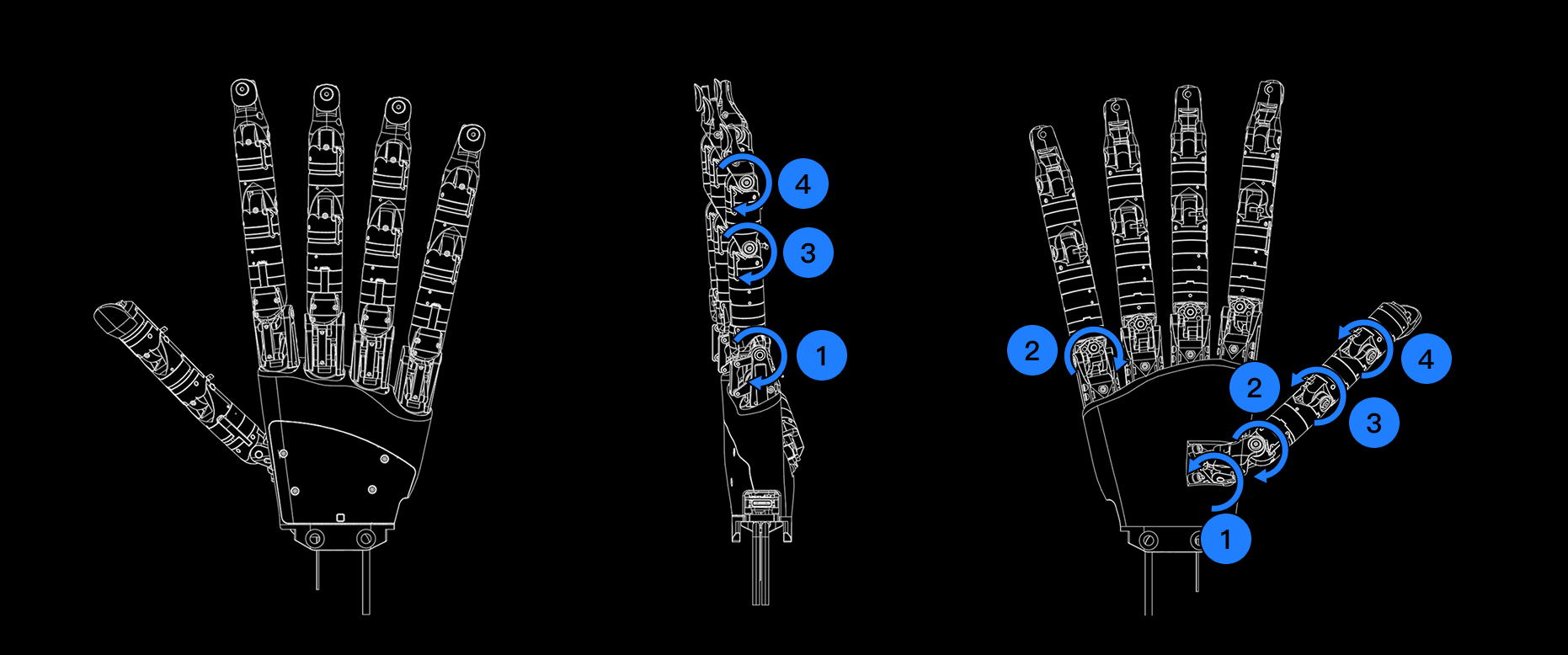
- 拇指
- 1:掌根展收,运动范围约 100°
- 2:掌根侧摆,运动范围约 80°
- 3:屈伸,运动范围约 130°
- 4:屈伸,运动范围约 130°
- 小指
- 1:屈伸,运动范围约 125°
- 2:侧摆,运动范围约 60°
- 3:屈伸,运动范围约 130°
- 4:屈伸,运动范围约 130°
3.4 通信与电源接口示意图
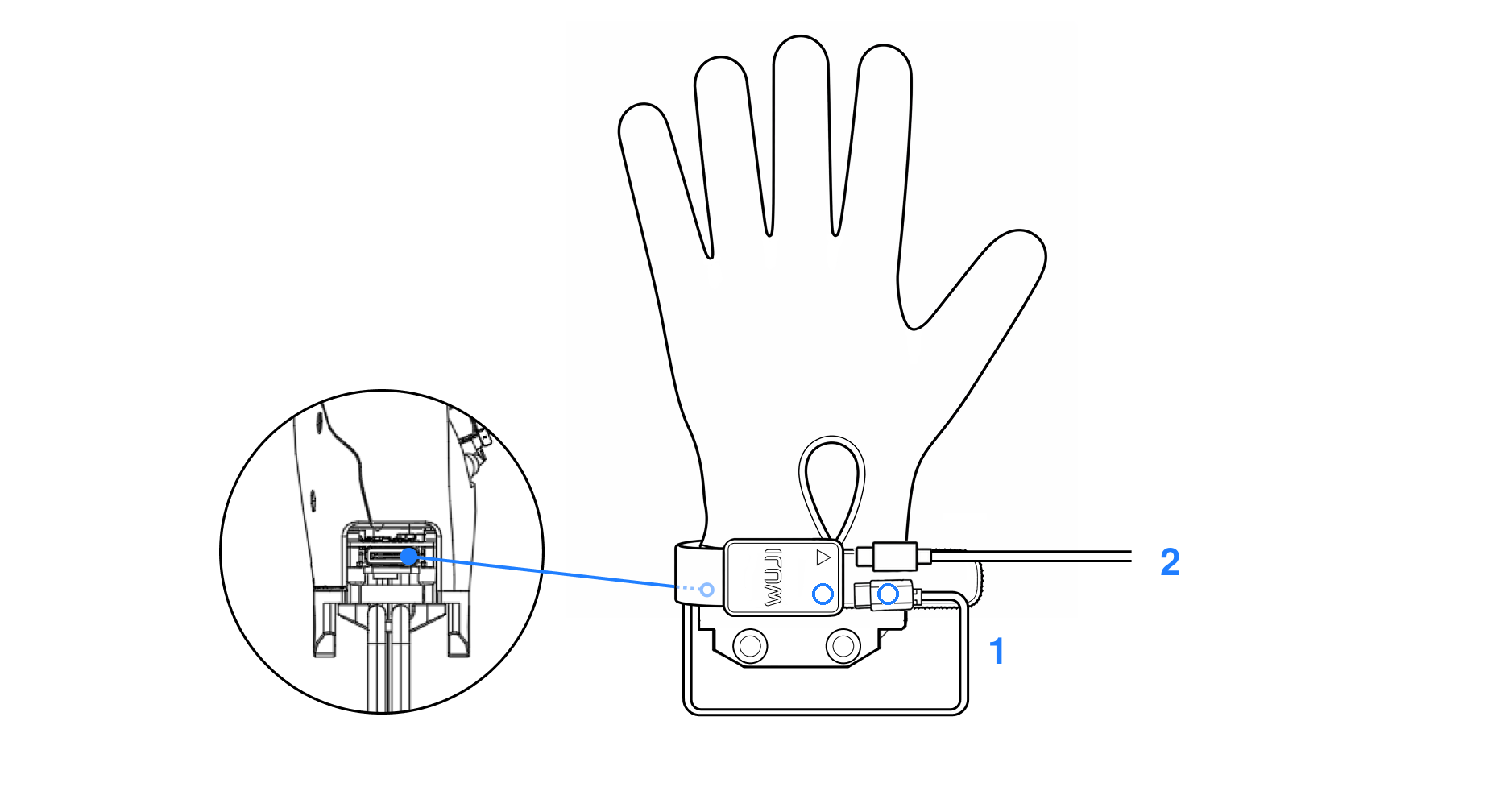
Wuji Hand 通过 USB-C 接口实现与上位机的数据通信,同时支持外部电源供电。下图展示了 Wuji Hand 的通信和电源接口位置及连接方式:
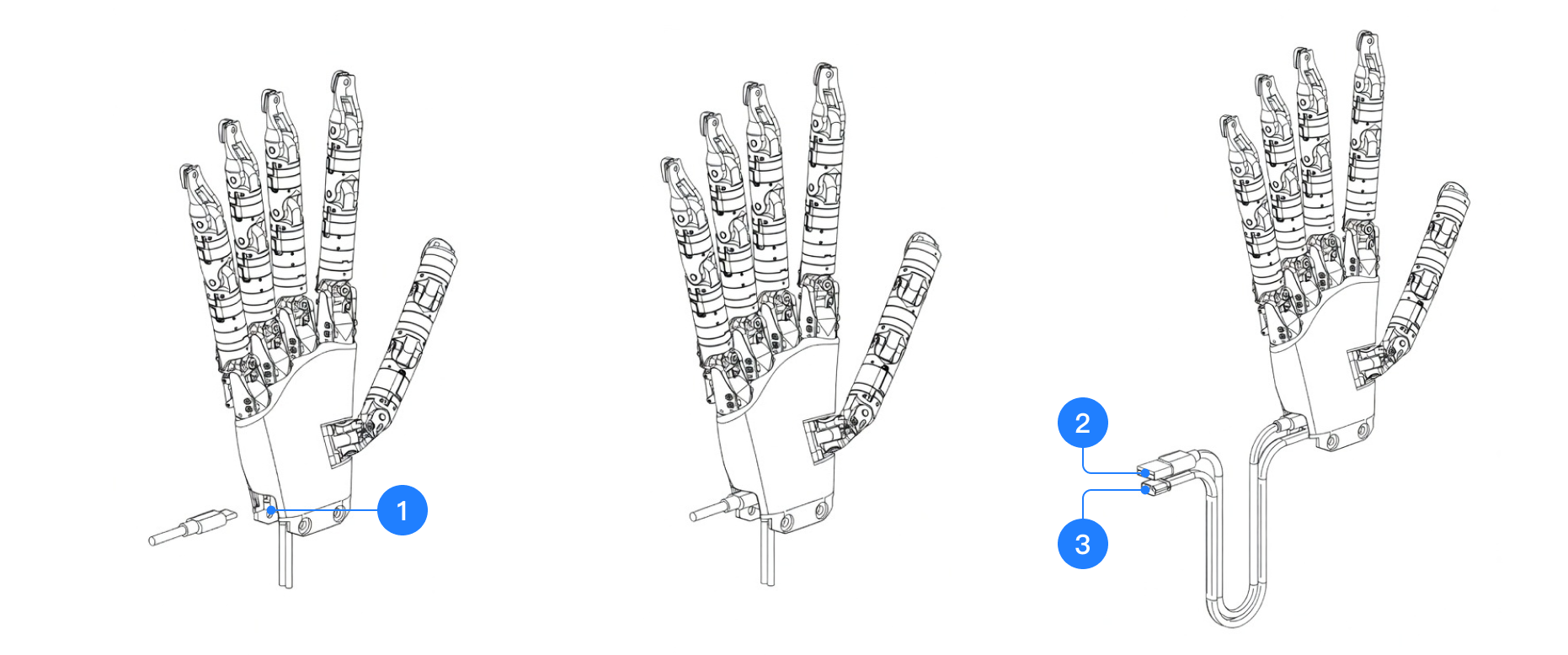
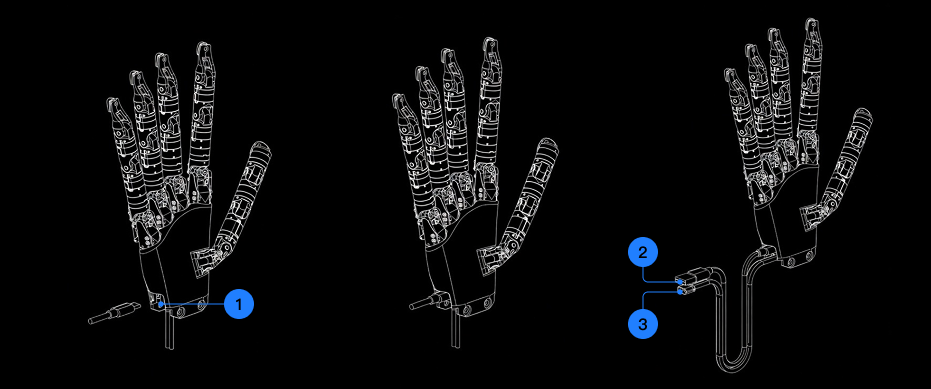
- 图中 1~3 分别为:
- 1:USB 数据线连接端(插入灵巧手设备)
- 2:USB 数据线另一端(连接至上位机或机器人控制器)
- 3:XT30 电源接口,用于外部供电接入
注意:为保障通信稳定性与供电安全,建议使用原装配套线材
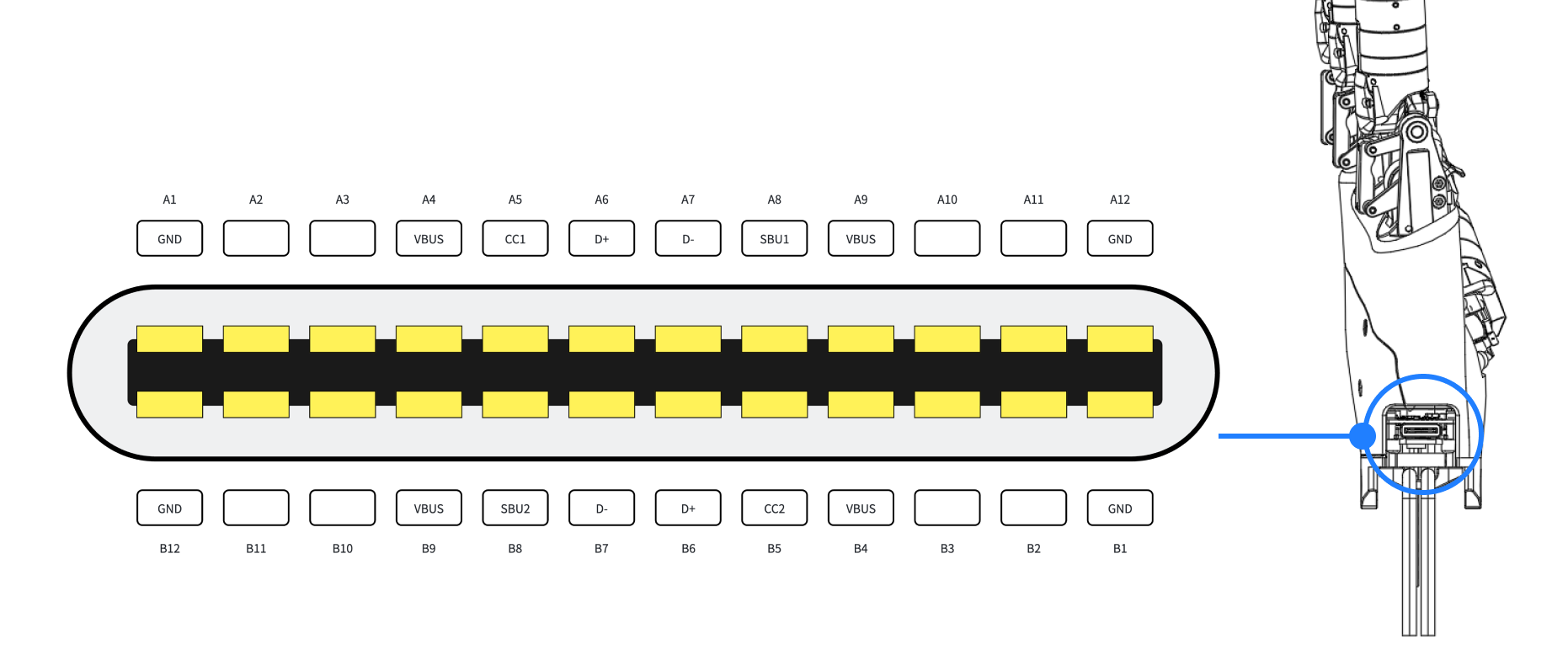
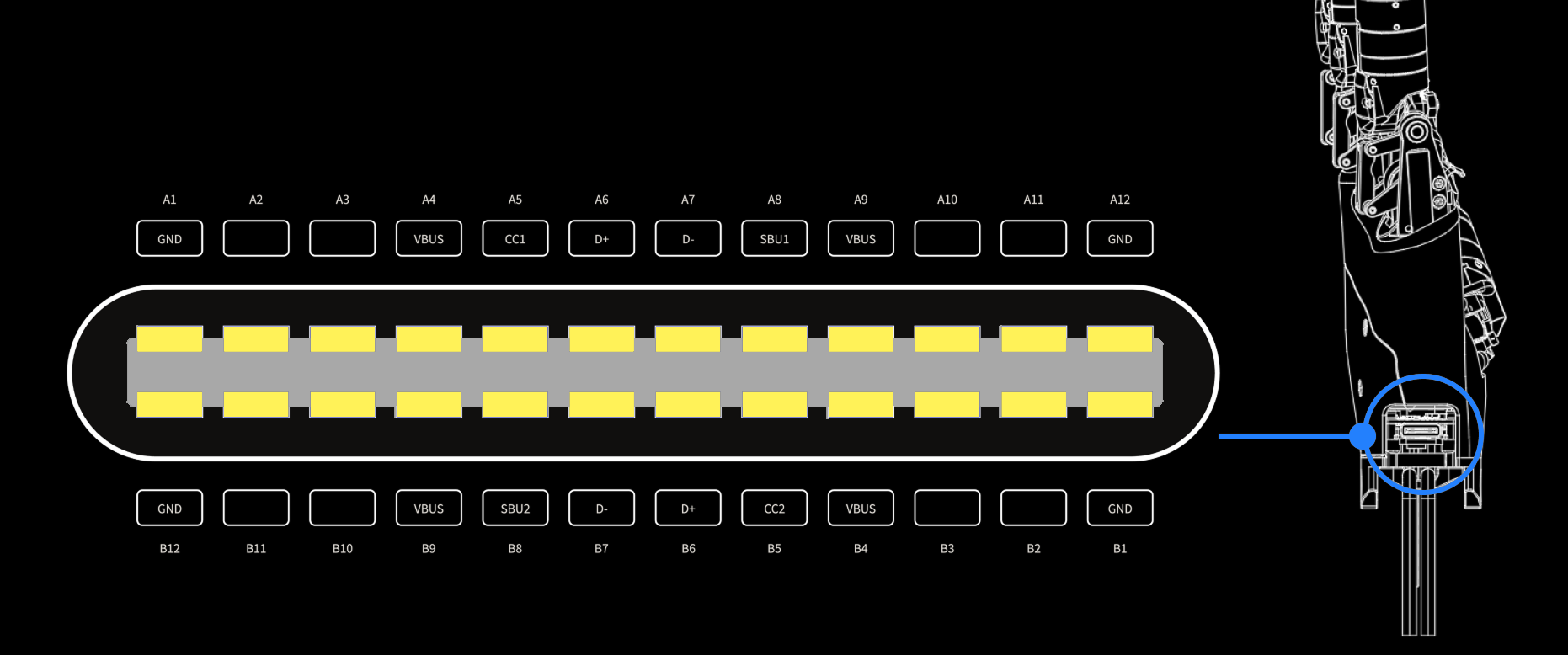
4. 产品电气特征
4.1 引脚定义
4.2 指示灯对照表
Wuji Hand 手背中下方设有 RGB 多色状态指示灯,实时反馈供电和系统运行状态。
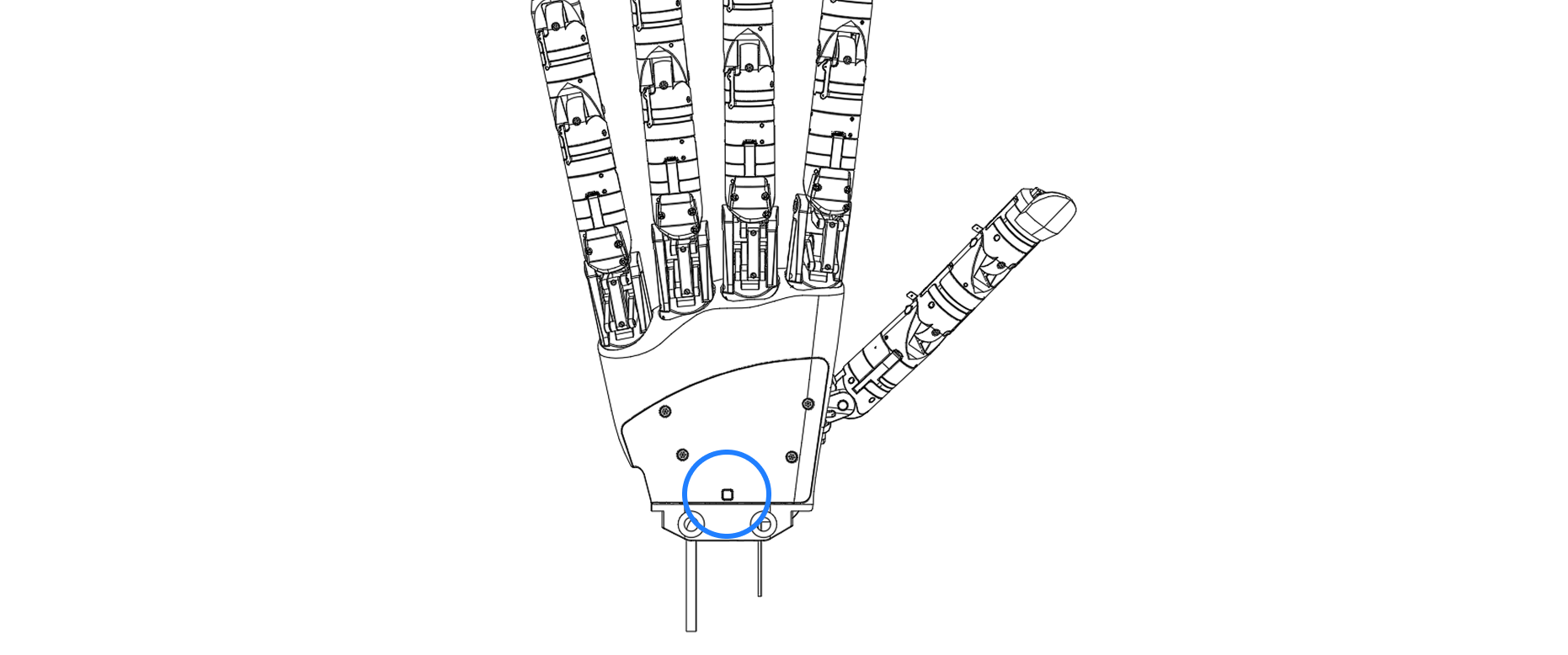
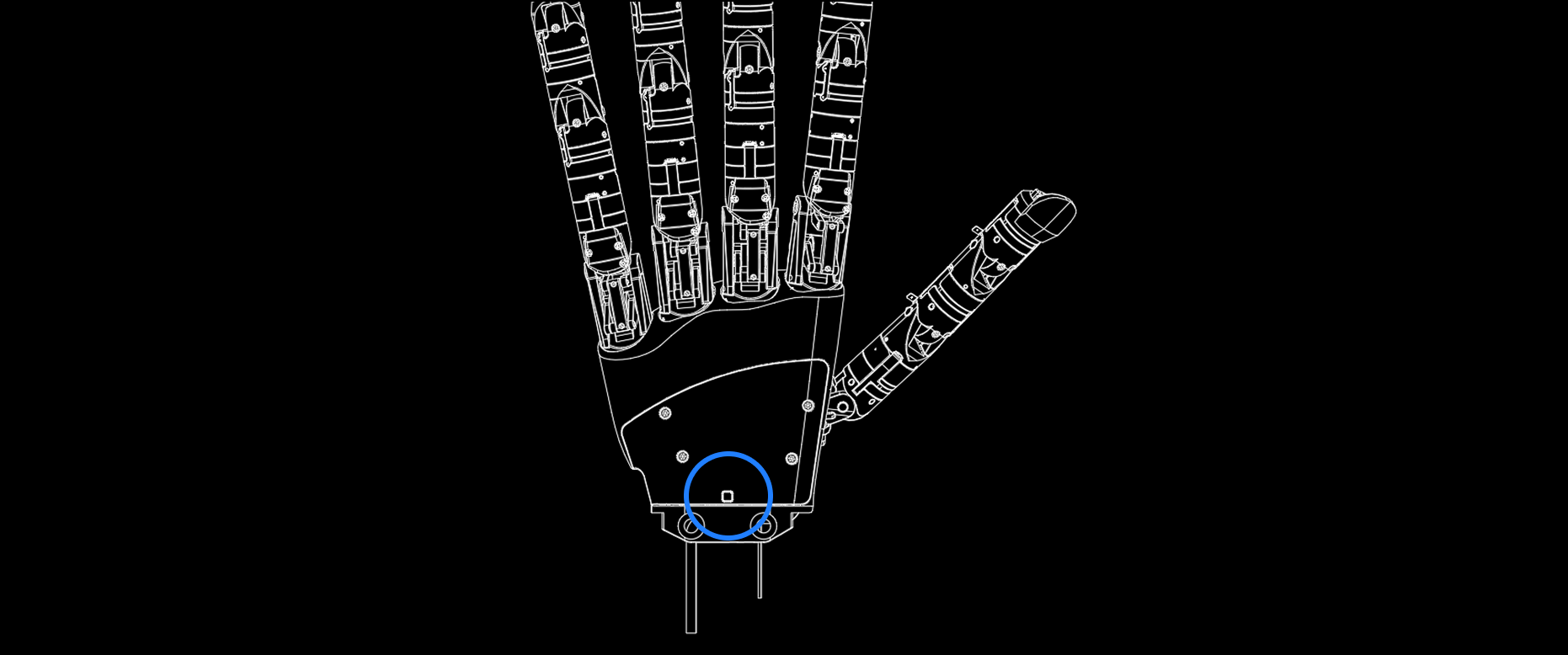
各状态对应含义如下表所示:
| 指示灯颜色 | 状态符号 | 系统阶段说明 | 说明 | |
|---|---|---|---|---|
 | 无灯 | OFF | 关机未上电状态 | 供电未接通或主电源故障 |
 | 蓝色常亮 | Bootloader | 固件更新或引导程序 | 设备处于引导程序中,若设备正在执行固件升级,此时严禁断电或重插线缆,以免导致系统损坏 |
 | 绿色闪烁 | Standby | 正常待机 | 供电正常,系统正常,未连接上位机或 SDK |
 | 绿色常亮 | Running | 正常运行 | 供电正常,系统已启动,已正常连接上位机或 SDK |
 | 黄色常亮 | Warning | 设备警告 | 系统检测到警告,如温度过高、供电波动等非致命故障,建议暂停调试,排查告警原因 |
 | 红色闪烁 | Pre-fault | 故障预警 | 即将发生故障的预警,如温度高接近过温阈值 |
 | 红色常亮 | Fault | 严重故障 | 发生严重硬件/软件故障(如主控 MCU 异常、通信失步等),应立即失能并依靠上位机排除故障(观察指示灯、终端日志、复位/恢复出厂) |
5. 产品配件介绍
5.1 产品配件表
| 图示 | 名称 | 说明 |
|---|---|---|
  | 电源适配器 | 供电 |
  | 电源适配器 AC 线材 | |
  | 抗冲击转接座 | 请见 5.3 抗冲击转接座 |
  | 直连转接座 | 连接 Wuji Hand 与用户设备(如机械臂法兰) |
  | 工具包 |
|
  | 配件包 |
|
  | USB A to USB C 线束 | 用于主机设备与 Wuji Hand 通信 |
  | 触觉感知手套(选配件) | 请见 5.2 触觉感知手套 是否随箱发货、配发左手或右手手套,均以实际订单为准 |
5.2 触觉感知手套
触觉感知手套(Tactile Sensing Glove)是 Wuji Hand 的选配触觉感知配件,面向科研与工程场景,可用于感知、数据采集、人机交互等任务,为算法适配、仿真建模与多模态融合提供统一的硬件基础。
- 高感知密度:全掌均布传感器阵列,数量超过 400 个,每个传感器独立捕获接触状态,通过超分辨率进一步提升感知能力
- 高柔顺性:完全柔性的 Nerve skin(柔性传感皮肤)可承载弯曲与拉伸形变,构建紧贴对象的动态感知阵列
5.2.1 系统要求
| 分类 | 项 | 要求 |
|---|---|---|
| 硬件准备 | USB-C 接口 | 上位机至少 1 个空闲 USB-C 接口(USB 2.0 及以上) |
| 线缆 | 配套 USB-C 数据线与短互联线(参考 连接方式) | |
| 建议电脑配置 | CPU | x86_64 或 ARM64 架构 |
| 内存 | ≥ 16 GB,满足并行处理多个数据流与可视化显示 | |
| 存储 | ≥ 1 GB 可用空间用于 SDK 与依赖安装 | |
| 操作系统 | SDK 平台 | 当前仅支持 Linux |
| 推荐发行版 | Ubuntu 22.04 / 24.04 | |
| Windows 支持 | 暂未支持,请等待后续版本 | |
| Python 环境(wujihandpy) | Python 版本 | 3.8 – 3.14 |
| 依赖 | numpy | |
| 安装 | pip install wujihandpy | |
| C++ SDK(wujihandcpp) | 发布包 | Deb / RPM,可直接安装 |
| 构建说明 | 详见 wujihandcpp | |
| USB 设备权限(Linux) | udev 规则 | 添加规则后无需 sudo 访问设备: |
5.2.2 产品参数
| 参数 | 技术指标 |
|---|---|
| 压力范围 | 0 - 400 kPa |
| 测量方式 | 压力-电阻 |
| 寿命 | > 100,000 次 |
| 误差范围 | ± 6% |
| 正常使用温度范围 | 0 ~ 40 °C |
| 存储温度范围 | -20 ~ 60 °C |
| 通信频率 | 120 FPS |
| 工作电压 | 3.3 V |
| 工作电流 | 300 mA |
| 通信方式 | USB |
| 重量 | 约 50 g |
| 传感器数量 | > 400 |
| 传感器分布 | 全掌,动态分布 |
| 传感器物理分辨率 | ≤ 40 mm² |
5.2.3 连接方式
拆装 Wuji Hand 触觉感知手套时,请先运行 Wuji Hand SDK 关节控制例程 中的 glove_donning.py,将整手平滑切换至拇指对掌内收、其余四指基本伸直的拆装姿态,请勿强行拉扯,以免掰坏手指关节。
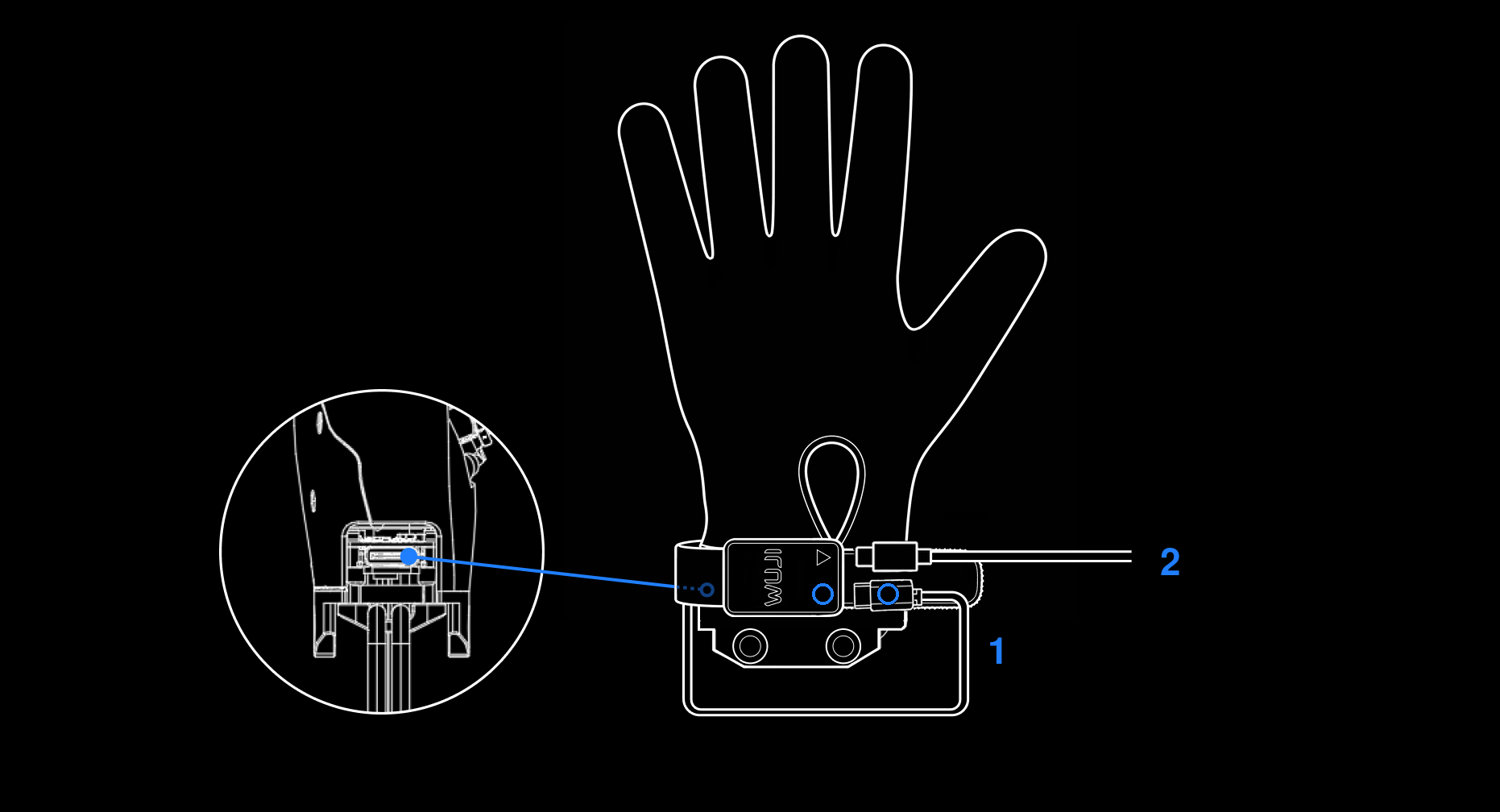
- 将标配短数据线标有圆形标识的一端连接至 Brain Watch 桥接端(圆形标识)。数据线另一端从 Wuji Hand 手腕内侧绕过后接入 Wuji Hand 通信接口。
- USB-C(USB 2.0 及以上)数据线与 PC 连接,任一 USB-C 端连接到 Brain Watch 输出端(三角标识),另一端连接至 PC。
5.2.4 通信接口
产品当前提供单一对外通信接口,简化上位机适配与集成路径。
| 分类 | 项 | 说明 |
|---|---|---|
| 物理接口 | 接口类型 | USB-C(USB 2.0 及以上) |
| 传输协议 | 模式 | USB CDC(虚拟串口),主机识别为标准串行设备 |
| Linux 节点 | /dev/ttyACM* | |
| USB 标识 | VID = 0x0483PID = 0x5700 | |
| 数据流 | 推送速率 | 最高 120 FPS,24 × 32 浮点压力帧 |
| 帧结构 | 含序号、时间戳与 CRC 校验,SDK 完成帧同步、丢帧统计与重连 | |
| 数据读取方式 | 推荐 | 官方 SDK(C++ / Python),获取结构化帧数据 |
| 调试 | 通用串口工具读取原始字节流 |
5.2.5 软件支持
官方 SDK 提供完整的数据访问与设备控制能力,覆盖从算法验证到生产部署的全流程。完整 API 参考见 SDK 使用说明 — 触觉感知手套。
SDK 接口
提供 C++ 与 Python 两套接口,共享底层实现,行为一致:
| SDK | 源码 | 安装方式 | 适用场景 |
|---|---|---|---|
| Python SDK (wujihandpy) | wuji-technology/wujihandpy | pip install wujihandpy | 算法验证、数据采集、快速集成 |
| C++ SDK (wujihandcpp) | wuji-technology/wujihandcpp | Deb / RPM / 源码构建 | 生产部署、低延迟实时控制 |
主要 API 功能
- 连接管理:
connect()/disconnect()/is_connected(),支持按 USB 序列号区分多设备 - 帧读取:阻塞式
read_frame(timeout_ms)或回调式流式读取start_streaming(callback)/stop_streaming() - 设备信息:
get_device_info()(序列号 / 硬件版本 / 固件版本)、get_fw_build()、get_handedness() - 诊断统计:
get_diagnostics()(上电时长 / 帧计数 / CRC 错误 / 丢帧 / USB 重置)、reset_counters() - 运行配置:
get_sample_rate_hz()/set_sample_rate_hz()(1–120 Hz)、set_streaming(enable) - 时间同步:
get_device_time()、sync_host_epoch(host_unix_ns),便于多设备时间对齐 - 生命周期:
reset_device()软复位 - 异常处理:USB 断连自动触发 DisconnectCallback,C++ 抛出
ConnectionLostError,Python 抛出对应异常
联合使用
触觉手套与 Wuji Hand 使用独立的 USB 传输与线程,可在同一进程内并行操作(参见 example/joint_with_tactile.py),实现触觉反馈驱动运动控制等闭环场景。
5.3 抗冲击转接座
抗冲击转接座采用旋扣和卡槽的锁定结构,在正常状态下保持高刚性连接。当遭遇超过安全阈值的外力冲击(如机械臂失控或末端强烈碰撞)时, Wuji Hand 与机械臂端将触发主动分离,保护关键部件(关节、电机、减速器等)免于损坏。此设计确保在提升可靠性的同时,最大限度降低维护与维修风险。
- 正常状态: 旋扣与紧定螺丝锁紧,保证结构稳定,不会因日常振动或小幅冲击而松脱。
- 异常状态: 超过安全阈值时自动释放,Wuji Hand 通过安全链悬挂,避免二次冲击或跌落隐患。
该触发机制经过工程优化,确保在日常小幅度震动或常规操作下不会误触发,只针对超过安全阈值的剧烈冲击有效。该机制主要覆盖大部分常见的冲击与易损场景,并不能完全避免所有极端情况下的潜在损伤。
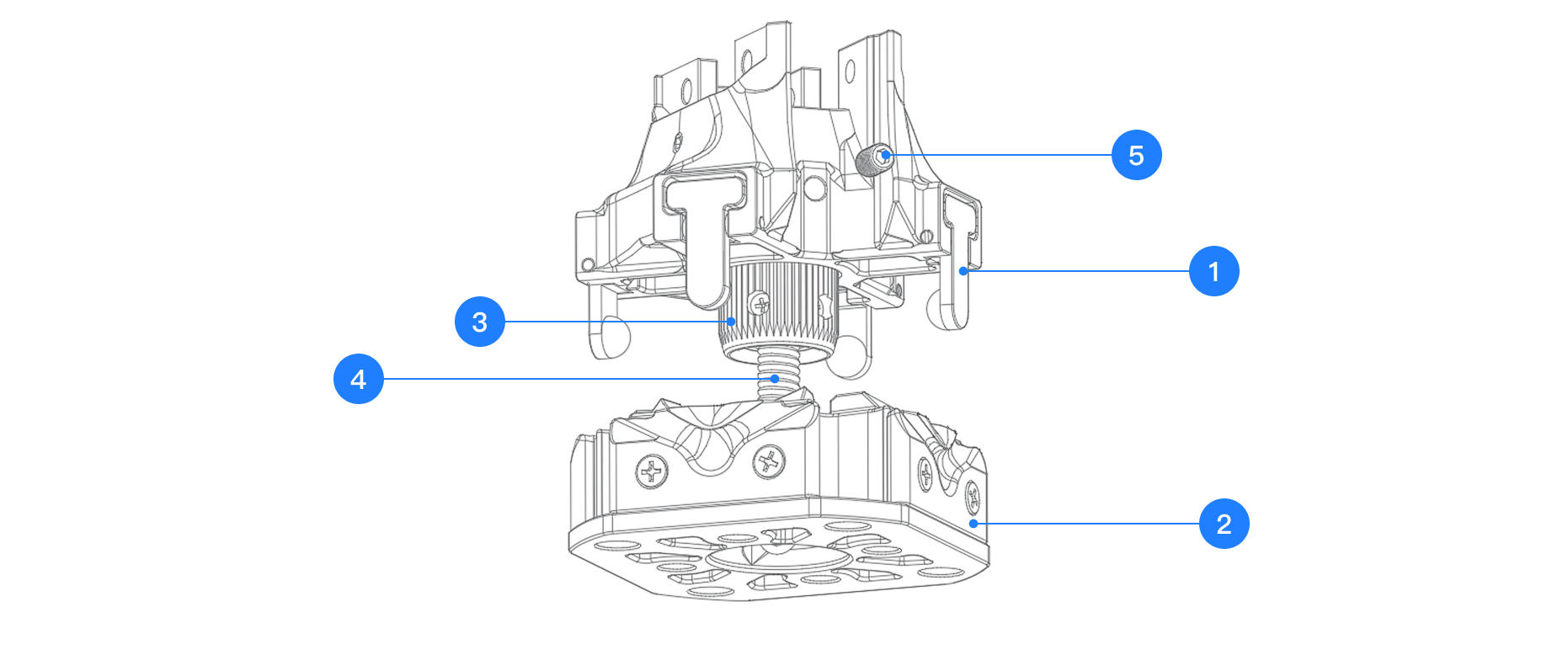
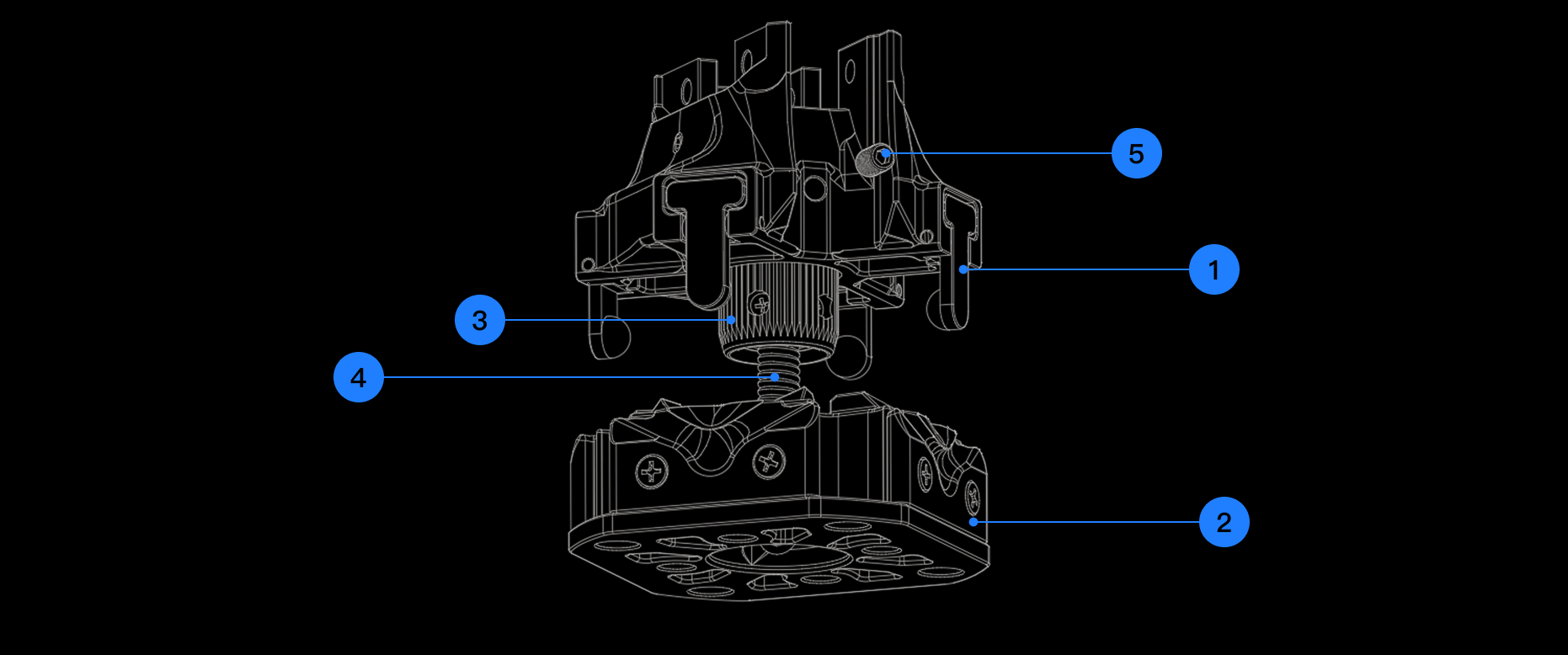
| 序号 | 组件名称 |
|---|---|
| 1 | 四爪锁扣 |
| 2 | 沟槽法兰 |
| 3 | 旋扣 |
| 4 | 安全链 |
| 5 | 紧定螺丝 |
6. 安装与拆卸
安全警示:
- 拆装过程中必须在断电状态下进行,禁止带电操作
- 安装完成后,确认旋扣完全旋紧并已锁定紧定螺丝,方可启动机械臂
6.1 安装步骤
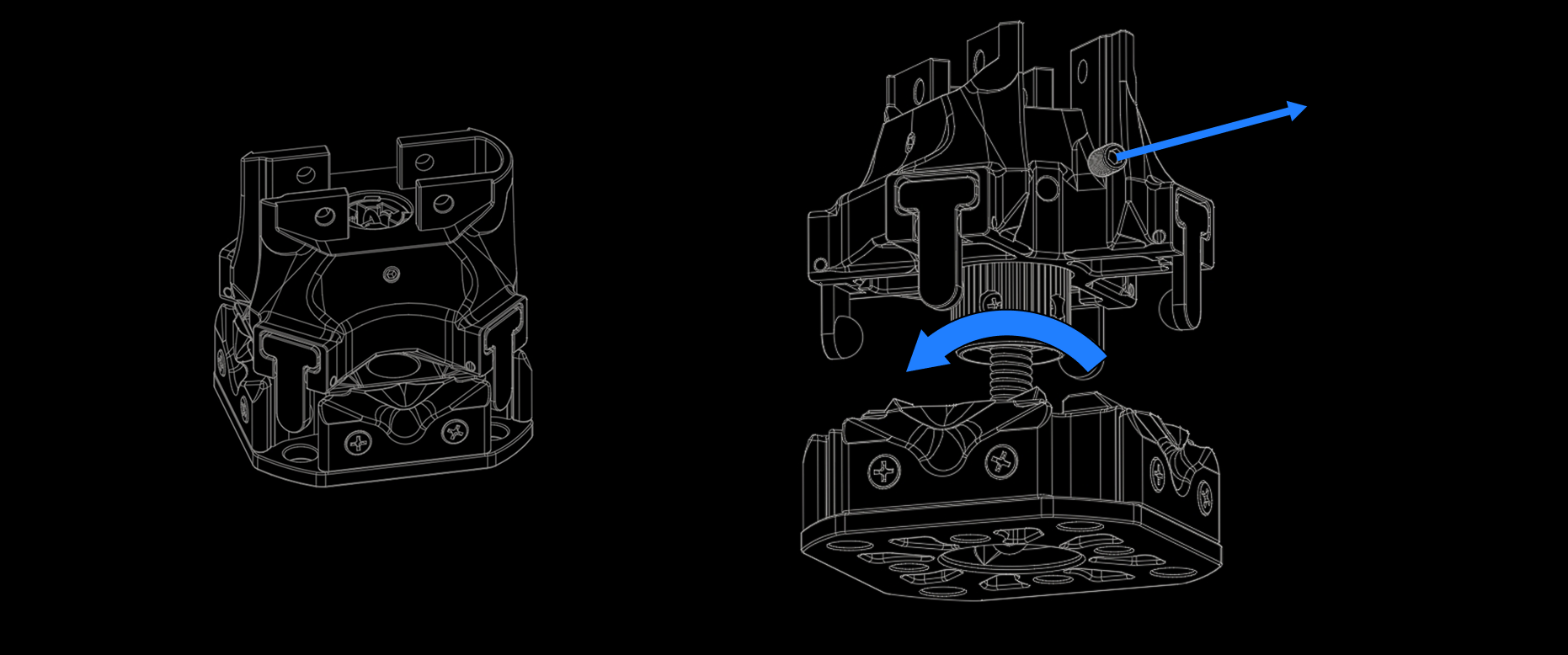
步骤 1: 将抗冲击转接座从包装中取出(图左),将四爪锁扣与沟槽法兰拉开(图右),取下紧定螺丝并逆时针旋开旋扣,分离上下两个部件。
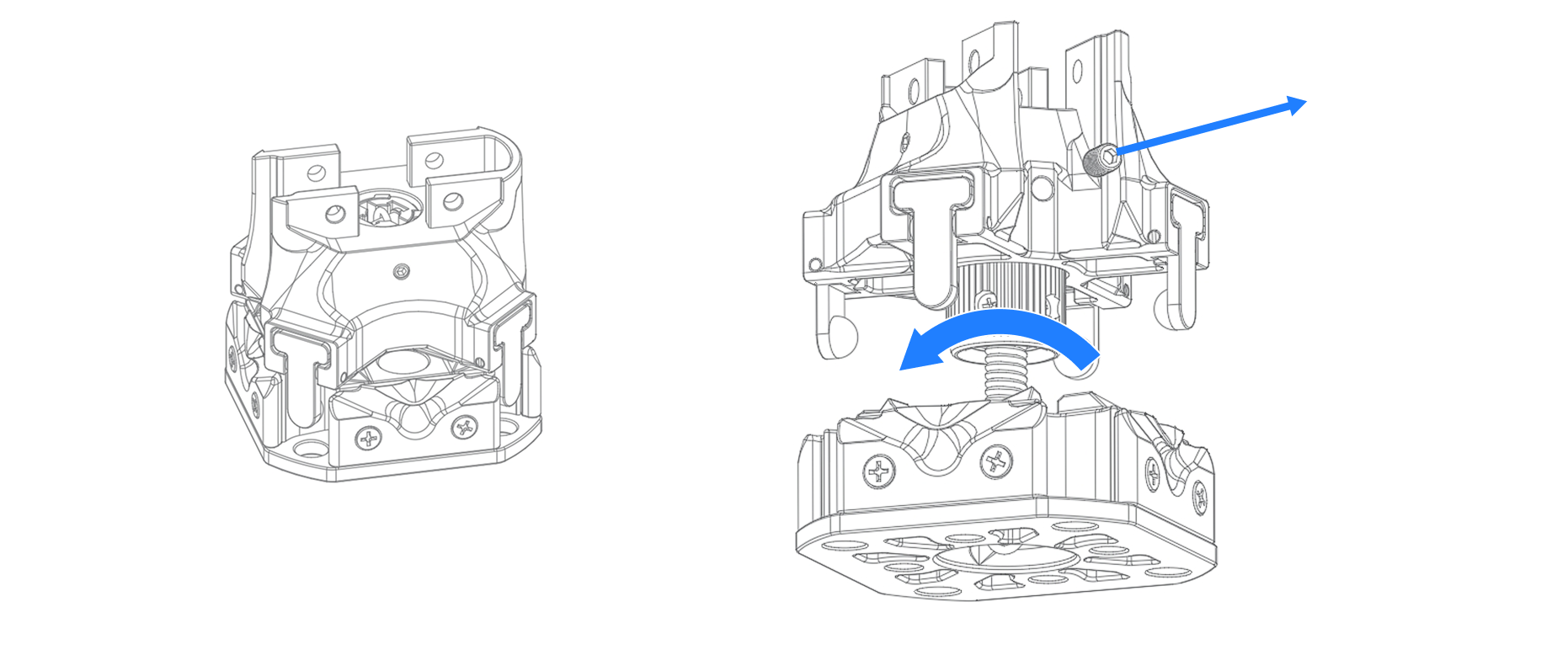
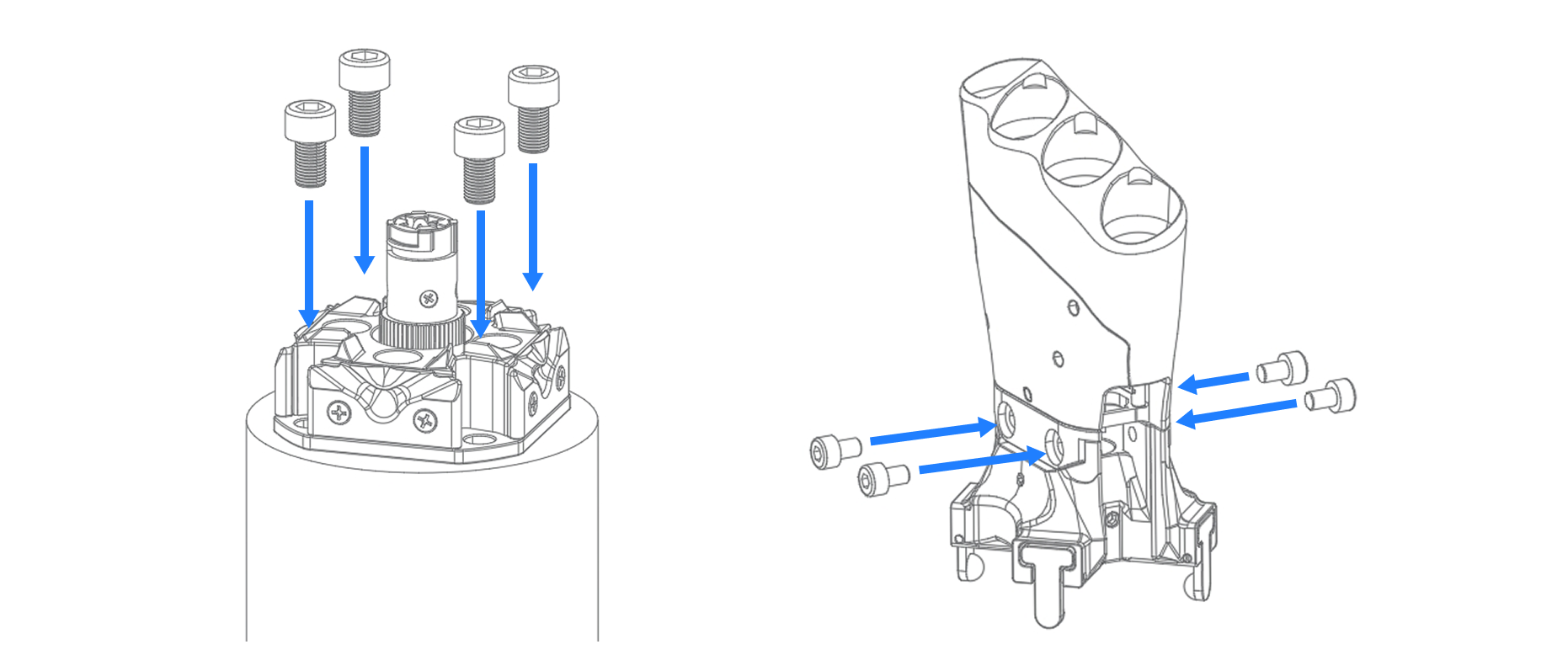
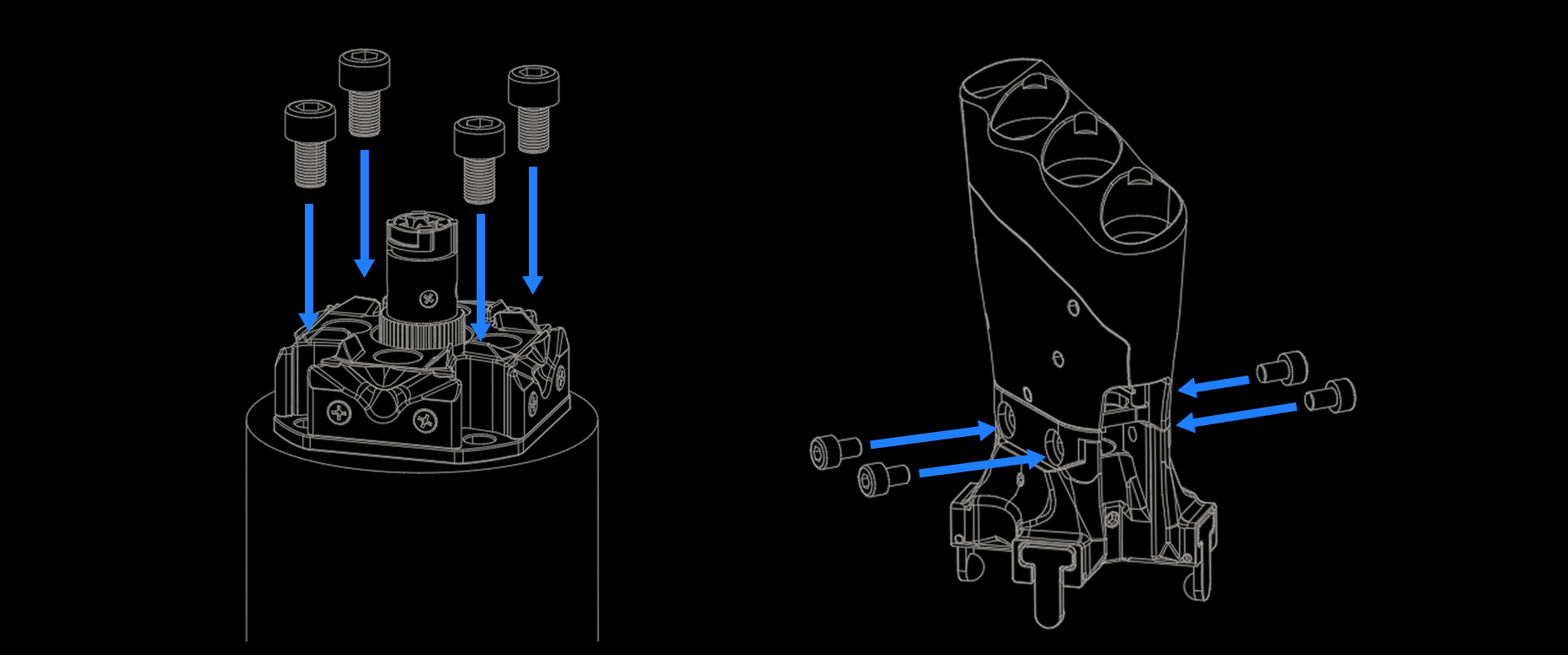
步骤 2: 使用螺钉将沟槽法兰连接到用户设备上(如机械臂),沟槽法兰上提供了两种孔位尺寸,配套的螺钉尺寸分别为 M5×10、M6×10。使用尺寸为 M4×6 的螺钉将 Wuji Hand 与四爪锁扣连接。
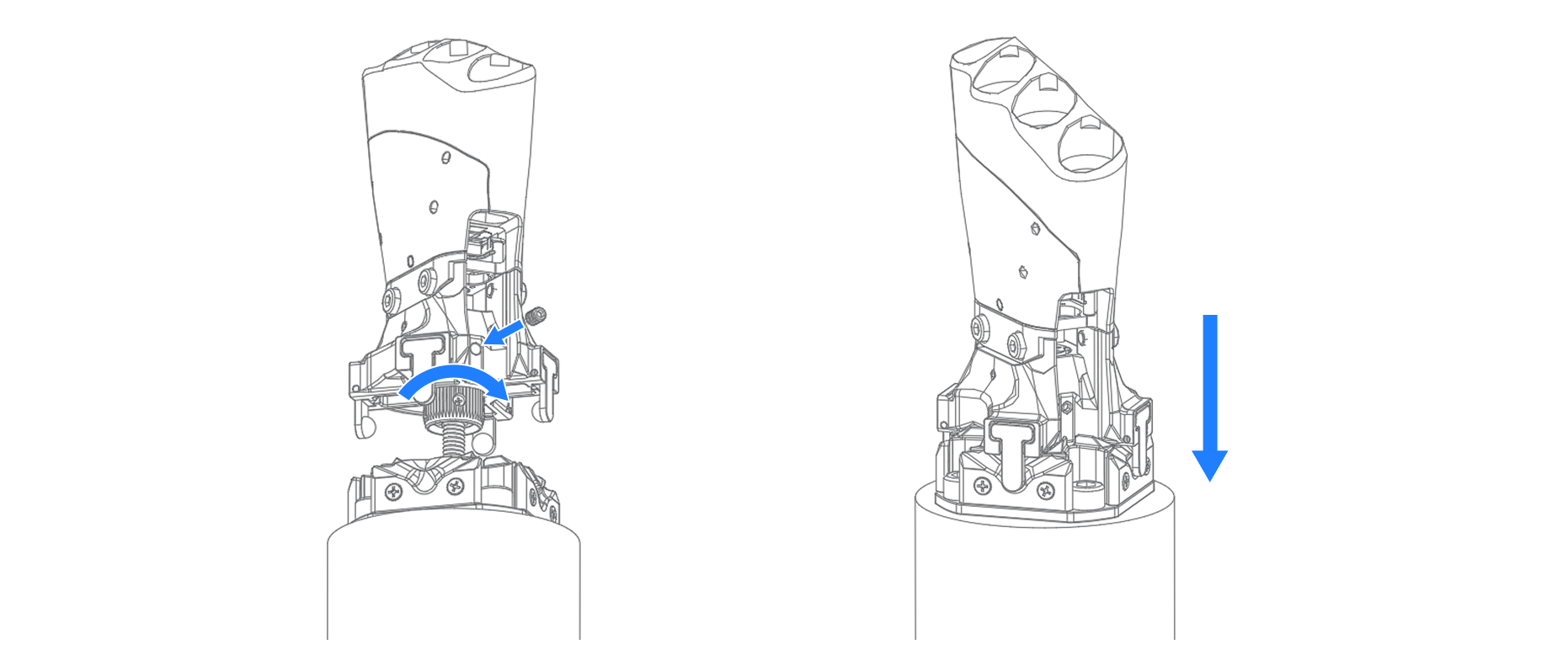
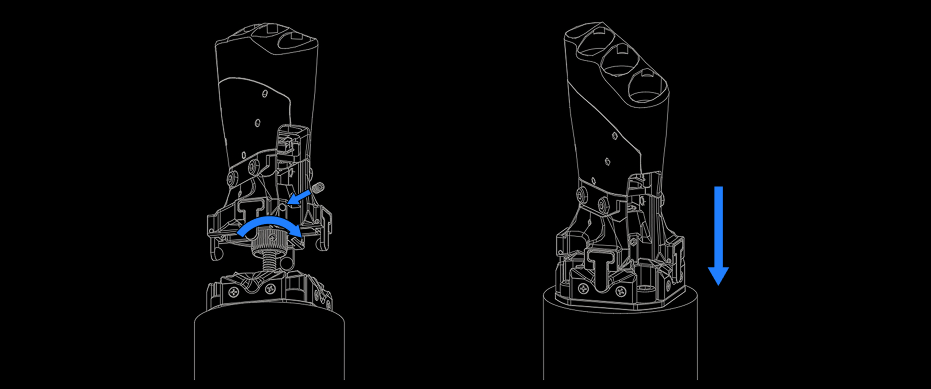
步骤 3: 将旋扣插入四爪锁扣中,并顺时针旋紧(轻扯安全链,旋扣不会滑脱)。拧上紧定螺丝。将四爪锁扣对准沟槽法兰的定位槽,按下扣合即完成抗冲击转接座的安装。
6.2 注意事项
6.2.1 紧固检查
- 使用推荐规格螺钉,严禁使用长度不足或规格不符的螺钉
- 建议按对角线顺序逐一紧固,以保证法兰面贴合均匀
- 若有条件,可根据螺钉规格配置推荐力矩扳手,确保拧紧力矩符合标准
6.2.2 维护与检修
- 每次安装或拆卸后,应检查 安全链、旋扣 是否灵活、无磨损、挂点是否松动
- 若在运行中触发抗冲击释放,应在重新安装前检查安装螺丝是否松动、旋扣锁定机构是否完好