HMI 使用说明
1. 启动 HMI
访问 GitHub Releases 页面,下载对应平台安装包。
| 平台 | 启动方式 |
|---|---|
| Windows | 解压后,双击 wuji-hand-hmi_<version>-windows 文件启动 |
| Ubuntu | 1. 安装:sudo apt install ./wuji-hand-hmi_<version>_amd64.deb2. 在应用菜单中打开,或终端执行 wuji-hand-hmi 启动 |
若启动过程中遇到问题,请参考故障排除章节。
2. 面板介绍
Wuji Hand HMI 软件面板由全局面板、单轴面板、日志面板构成。
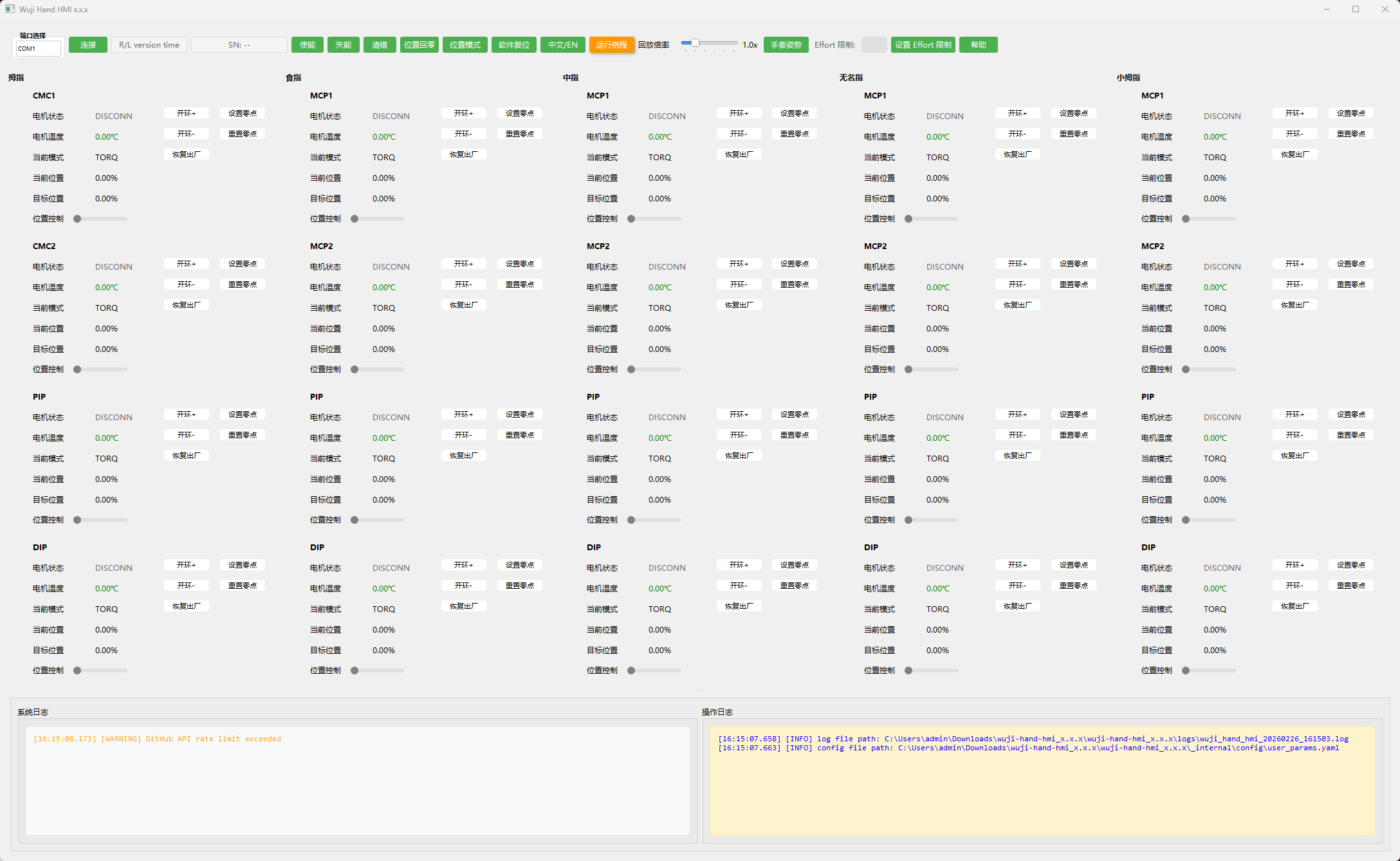
2.1 全局面板
全局面板用于整手级操作与状态查看,操作对象是整手,反馈信息来源于脊髓板。

| 名称 | 说明 |
|---|---|
| 端口选择 | Linux 版 HMI 自动筛选端口。Windows 版 HMI 不自动筛选端口,先启动 HMI,再连接灵巧手,可在日志面板的操作日志中看到 |
| 连接 / 断开 | 选择正确端口后点击连接建立通信,需要结束会话时点击断开。 |
| 脊髓板状态显示框 | 显示:左/右手、系统固件版本号、在线时长,如 Left 1.2.0 24m59s。 |
| SN | 显示设备序列号。 |
| 使能 | 点击使能所有关节轴电机使能,电机状态为 RUN。 |
| 失能 | 点击失能所有关节轴电机失能,电机状态为 READY。 |
| 清错 | 若出现 WARNING/ERROR/FATAL,请先点击清错,状态恢复后再尝试使能。 |
| 位置模式 / 位置回零 | 点击位置模式将电机模式设为 RT_FCL,在使能状态下点击位置回零,整手恢复到零点姿态。 |
| 软件复位 | 需要重启整手驱动时,点击软件复位,电机状态短暂为 DISCONN,完成后电机状态为 READY。 |
| 中文 / EN | 中英文切换。 |
| 运行例程 | 点击运行例程后,按预置执行动作序列。用于快速验证通信与基础运动链路。 |
| 回放倍率 | 控制例程回放的速度倍数,拖动滑条调节。范围 0.5x ~ 3.0x,默认 1.0x。 |
| 手套姿势 | 点击手套姿势后,整手自动调整至适合拆装的姿态,供拆装软体/手套时便于操作。 |
| Effort 限制 | Effort 限制输入框,用于填写目标值,配合设置 Effort 限制按钮使用。 |
| 设置 Effort 限制 | 设置关节允许的最大 effort 输出。范围为 0-3.5 (A),默认值为 1.5 (A)。在输入框中填入目标值后点击设置 Effort 限制。 什么是 Effort? Effort 是电流空间的执行器作用量,经过滤波处理后输出。它不是实际测量的电流值,应将其理解为相对驱动强度,适用于负载监控和碰撞检测等场景。 警告:修改 Effort 限制 可能导致设备损坏 提高 Effort 限制 值会提升电机输出扭矩,同时增加电机发热。如因调整设置导致设备损坏,用户需自行承担责任。
|
| 帮助 | 点击帮助跳转到本篇文档。 |
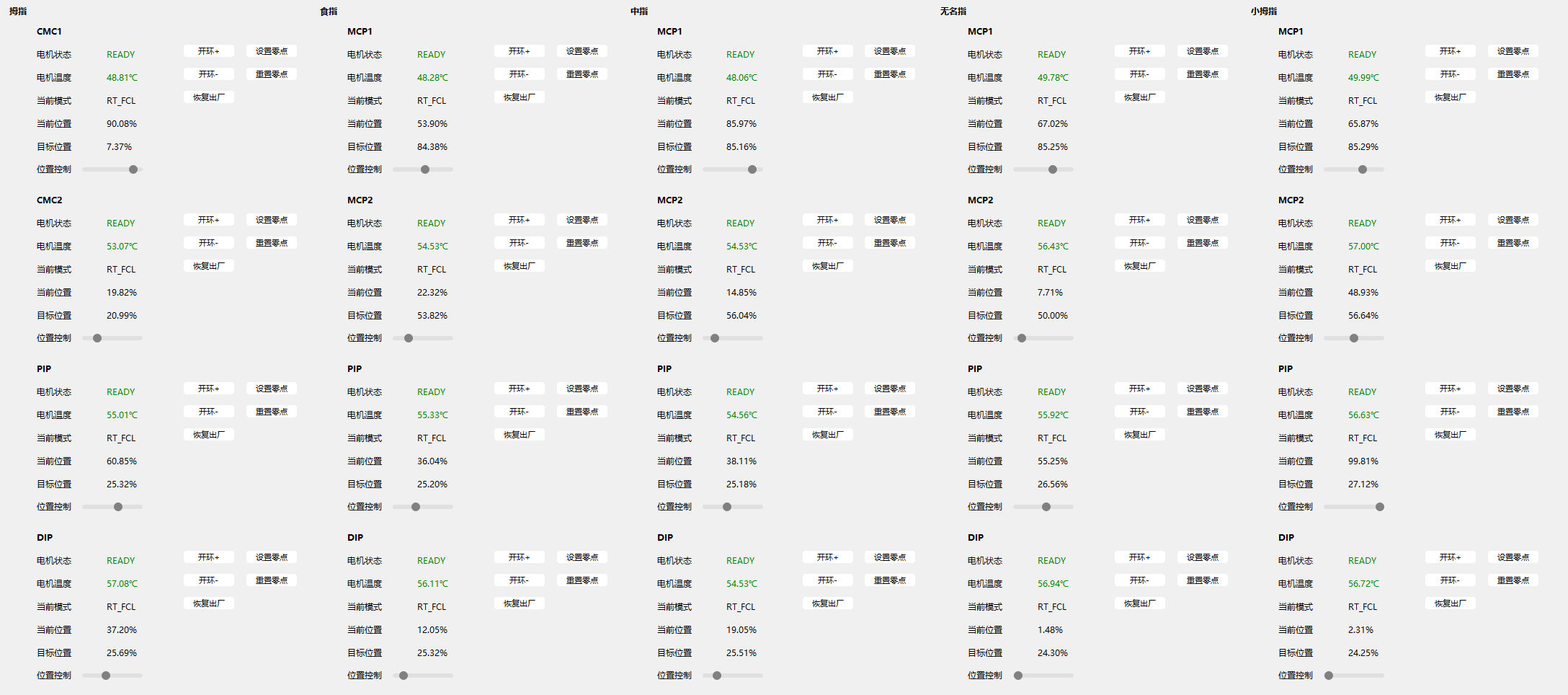
2.2 单轴面板
单轴面板用于单轴操作与状态查看,操作对象是单个关节轴,反馈信息来源于驱动板。
| 名称 | 说明 |
|---|---|
| 关节 | 关节名称。 |
| 电机状态 |
|
| 电机温度 | 显示当前电机温度。 |
| 当前模式 | 显示当前控制模式,如 RT_FCL。 |
| 当前位置 | 显示位置反馈在限位标定行程范围之内的百分比。 |
| 目标位置 | 显示位置期望在限位标定行程范围之内的百分比。 |
| 位置控制 | 当前模式为 RT_FCL 且电机状态为 RUN 时,拖动滑条设定目标位置。 |
| 开环+ / 开环- | 对应电机运动的顺时针/逆时针两个极性,长按开环+或开环-,电机朝向一侧转动。 |
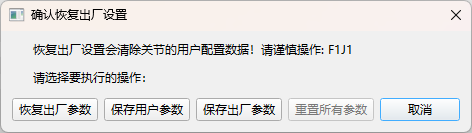
| 恢复出厂 | 点击恢复出厂出现弹窗:
恢复出厂后,点击全局面板中的软件复位按钮,变更参数即可生效。
|
| 设置零点 / 重置零点 | 由于出厂时标定的零点可能与 URDF 零点存在细微偏差,为满足用户 Sim2Real 需要,可以手动设置一个接近 URDF 零点的用户零点。
|
2.3 日志面板

日志面板分为左右两栏。左侧为系统日志,记录 WARNING 等级及以上的警告或错误。右侧为操作日志,记录必要的初始化信息及用户操作过程。在日志区域右键,可执行:
- 复制系统日志 / 复制操作日志:复制所选日志内容到剪贴板。
- 导出日志:打包导出系统日志与操作日志全部内容,用于问题排查。
- 清除系统日志 / 清除操作日志:清除对应区域的日志记录。
- 清除所有日志:同时清除系统日志与操作日志。
当设备或上位机出现异常时,请先在日志面板导出日志并保存,再与问题现象描述一并提供给售后,以便快速定位原因。
3. 连接与使能
3.1 设备连接
确认硬件连接正确,按启动 HMI中的方式打开上位机软件。启动成功后,日志面板的操作日志中显示以下信息:
[INFO] Successfully bound SDO socket to 127.0.0.1:xxxxx
[INFO] Successfully bound PDO socket to 127.0.0.1:xxxxx
[INFO] heart beat timer is enabled
[INFO] connection established
[INFO] Device SN displayed: xxxx.xxxxxx.xxx
[INFO] System Version: x.x.x点击全局面板中的连接按钮,成功连接后:
- 全局面板中的脊髓板状态显示框显示:左/右手、系统固件版本号、在线时长,如
Left 1.2.0 24m59s。 - 单轴面板中的电机状态为
READY,电机温度等数据持续刷新。
3.2 快速验证动作
点击全局面板中的运行例程,整手将循环执行一段预设动作序列,用于验证通信与运动功能。
在动作序列执行期间请勿进行其他操作。
4. 故障排除
4.1 端口访问权限
启动 Ubuntu 版上位机时,出现无法找到端口问题:
-
方法一:将当前用户加入
dialout组sudo usermod -a -G dialout $USER执行后需使权限生效:
- 仅当前终端生效:
newgrp dialout - 全局生效:
sudo reboot
- 仅当前终端生效:
-
方法二:sudo 启动上位机
sudo wuji-hand-hmi
4.2 显示缩放警告
若启动时弹出显示缩放警告,说明当前系统显示缩放比例大于 100%。请在系统设置中将显示缩放比例调整到 100% (1:1),然后重新启动 HMI。