Product Introduction
This manual covers a Beta 1 prototype. Its parameters and behavior don't represent the final product.
1. Overview
Wuji Hand 2 is WUJI TECH's second-generation biomimetic dexterous hand with 20 active degrees of freedom, built for research, robot integration, human-machine interaction, and other scenarios.
In Beta 1, the product provides:
- A 20-DoF biomimetic five-finger body in which each active joint drives independently and the thumb supports opposition
- MIT force-position hybrid control with user-tunable parameters
- A factory-standard wrist flange with wrist mounting drawings included
- A joint-level Python SDK for device discovery, state reading, and command output
It also includes a Wuji Glove–based teleoperation (teleop) demo and a URDF simulation model (skeleton only).
2. Specifications
The core specifications below cover structure, dimensions and weight, drive and control, and electrical characteristics—for product selection, simulation modeling, and integration.
| Category | Parameter | Typical value or description |
|---|---|---|
| Structure & DoF | Active DoF | 20 (4 per finger) |
| Joint count | 20 (4 per finger) | |
| Grasp configuration | Full opposition, with lateral abduction supported | |
| Kinematic configuration | Serial direct-drive rotary joints, no nonlinear kinematic coupling | |
| Min grasp diameter | 0 mm | |
| Dimensions & Weight | Weight (with soft body, excl. cables) | 745 ± 10 g |
| Dimensions | 180 mm × 80 mm × 40 mm | |
| Drive | Drive type | Back-drivable direct-drive rotary joints |
| Control algorithm | FOC vector control | |
| Control & Communication | Control frequency | 1000 Hz × 20 axes |
| Communication interface | Ethernet | |
| Control mode | MIT force-position hybrid control | |
| Communication protocol | Ethernet | |
| Electrical | Operating voltage | 12 V DC |
| Power adapter | 12 V 20 A (included) |
3. Mechanical Structure
This section describes the overall structure, the communication and power interface layout, and the naming and motion parameters of each degree of freedom, to help you understand the mechanical structure and how to use it.
3.1 Overall Dimensions
The figure below shows the overall dimensions of Wuji Hand 2 with all five fingers fully extended and together, for workspace planning and mounting design.
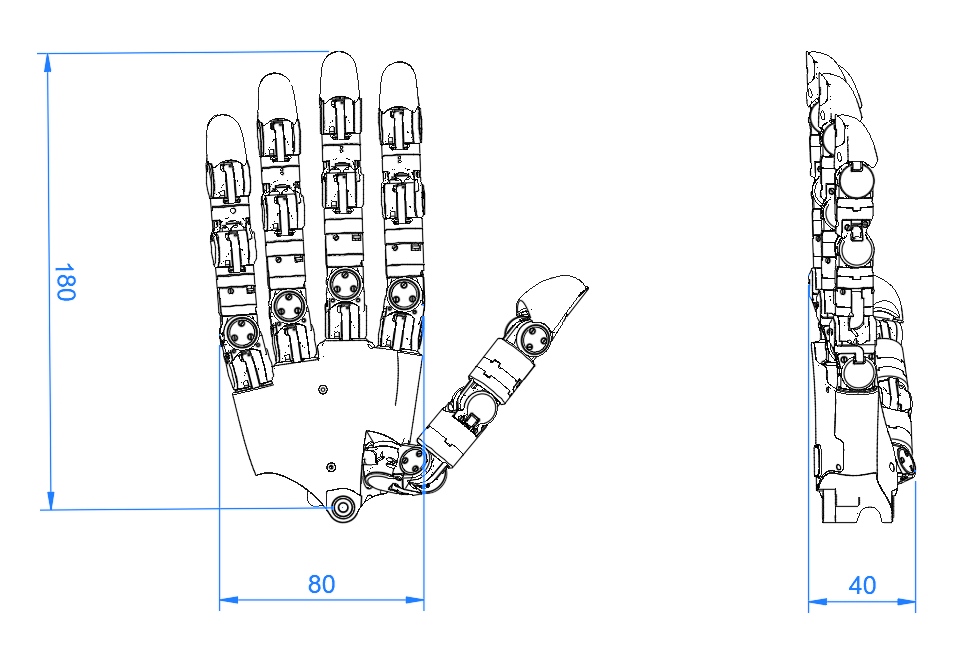
Dimensions in mm: length 180, width 80, thickness 40.
3.2 Structure Diagram
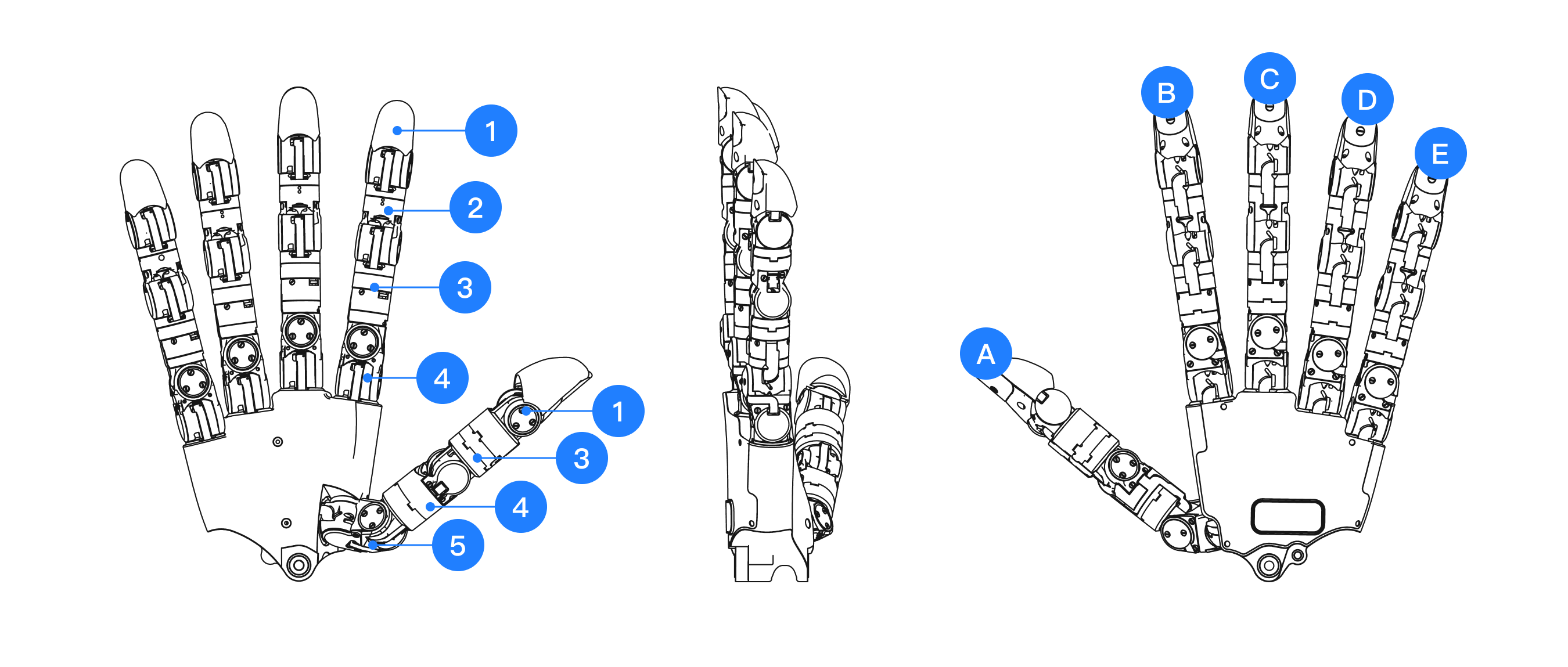
A–E correspond to the five fingers:
| No. | Finger |
|---|---|
| A | Thumb |
| B | Index |
| C | Middle |
| D | Ring |
| E | Little |
1–5 correspond to common anatomical regions of the hand:
| No. | Region |
|---|---|
| 1 | Distal phalanges |
| 2 | Intermediate phalanges |
| 3 | Proximal phalanges |
| 4 | Metacarpals |
| 5 | Carpals |
3.3 Degree-of-Freedom Configuration
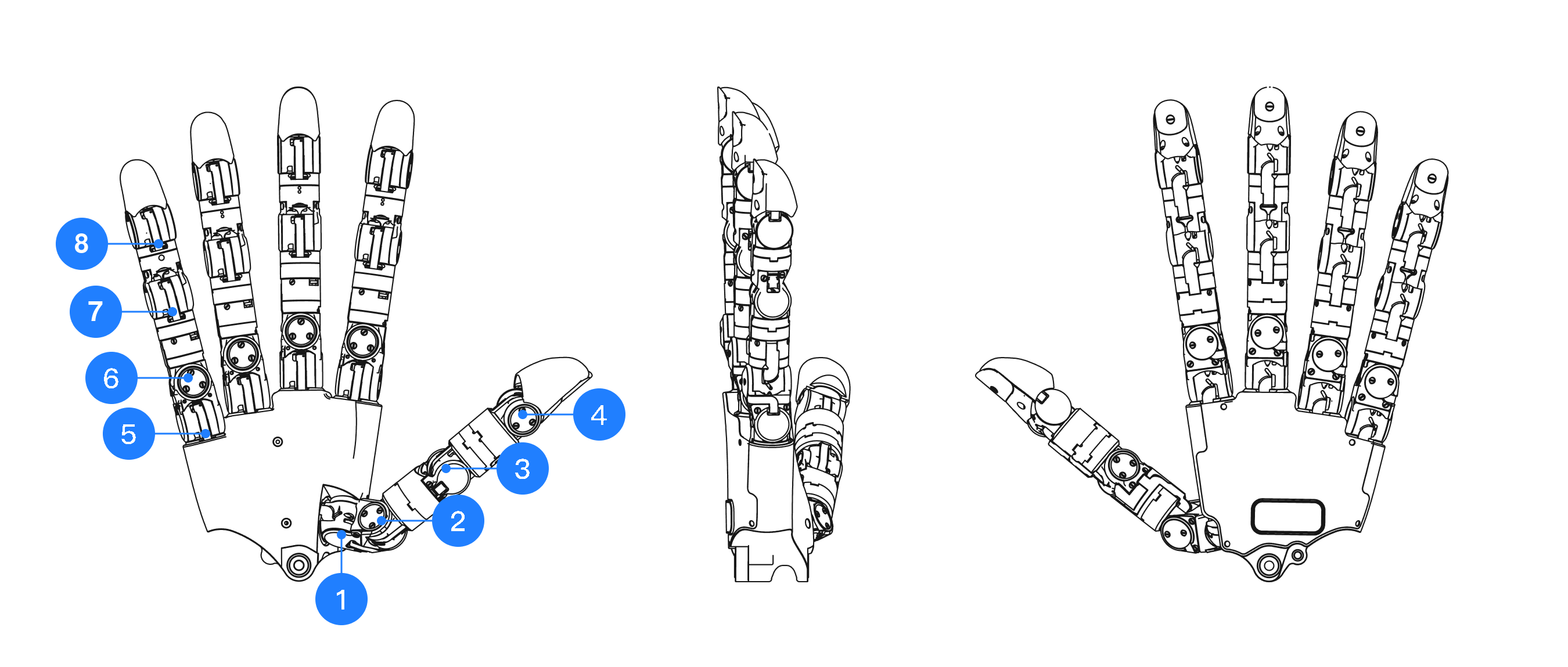
1–8 correspond to:
| No. | Joint |
|---|---|
| 1 | thumb_cmc_flex |
| 2 | thumb_cmc_abd |
| 3 | thumb_mcp |
| 4 | thumb_ip |
| 5 | mcp_flex |
| 6 | mcp_abd |
| 7 | pip |
| 8 | dip |
3.4 Joint Motion Direction and Range
The index, middle, and ring fingers share the same structure, each about 137 mm long. The little finger is slightly shorter, about 134 mm. The thumb module differs slightly, about 140 mm. The figure below uses the thumb and little finger as examples to show each DoF's motion direction and angle range:
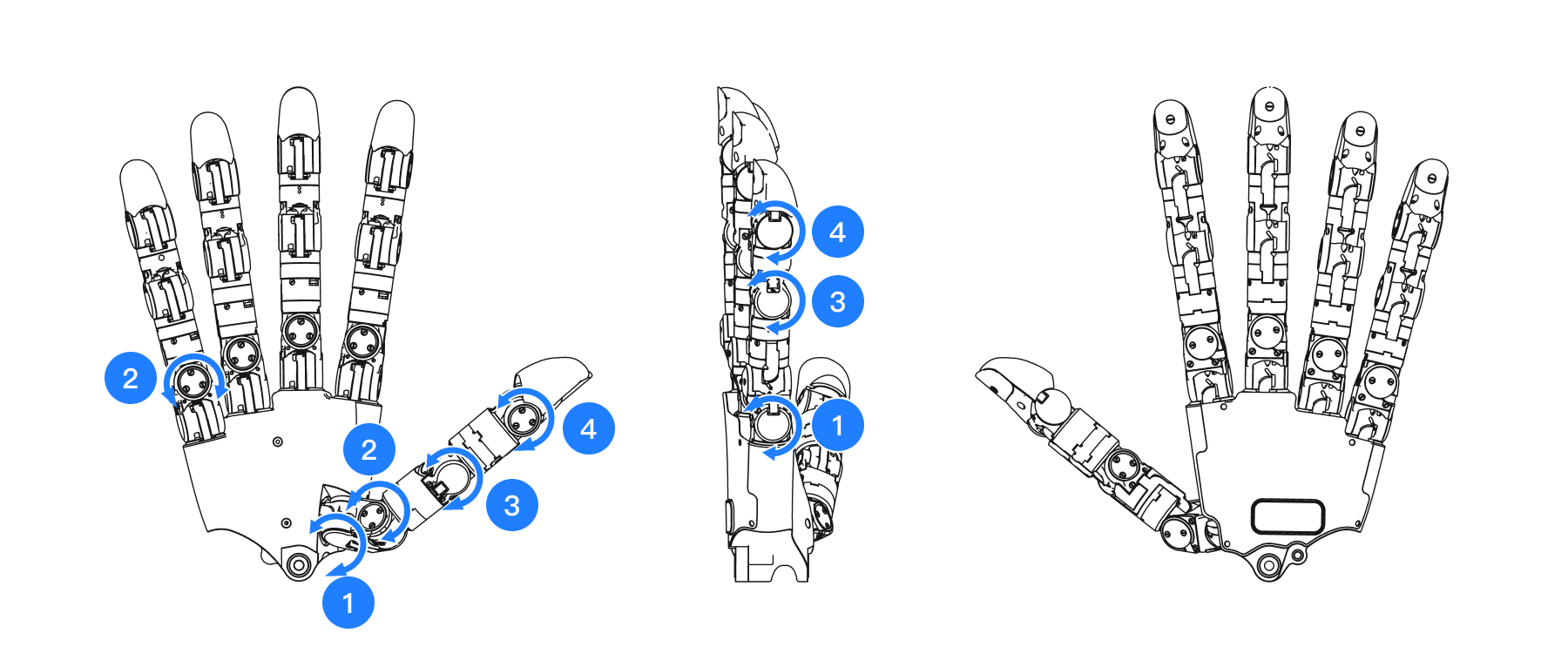
Thumb
| Joint | Motion | Range |
|---|---|---|
| 1 | Base abduction/adduction | -68° ~ 74° |
| 2 | Base lateral swing | -85° ~ 40° |
| 3 | Flexion/extension | -60° ~ 90° |
| 4 | Flexion/extension | -60° ~ 90° |
Little finger
| Joint | Motion | Range |
|---|---|---|
| 1 | Flexion/extension | -60° ~ 90° |
| 2 | Lateral swing | -40° ~ 40° |
| 3 | Flexion/extension | -60° ~ 120° |
| 4 | Flexion/extension | -60° ~ 90° |
3.5 Communication and Power Interface
Wuji Hand 2 communicates with the host over an RJ45 interface and supports external power. The figure below shows the location and connection of the communication and power interfaces:
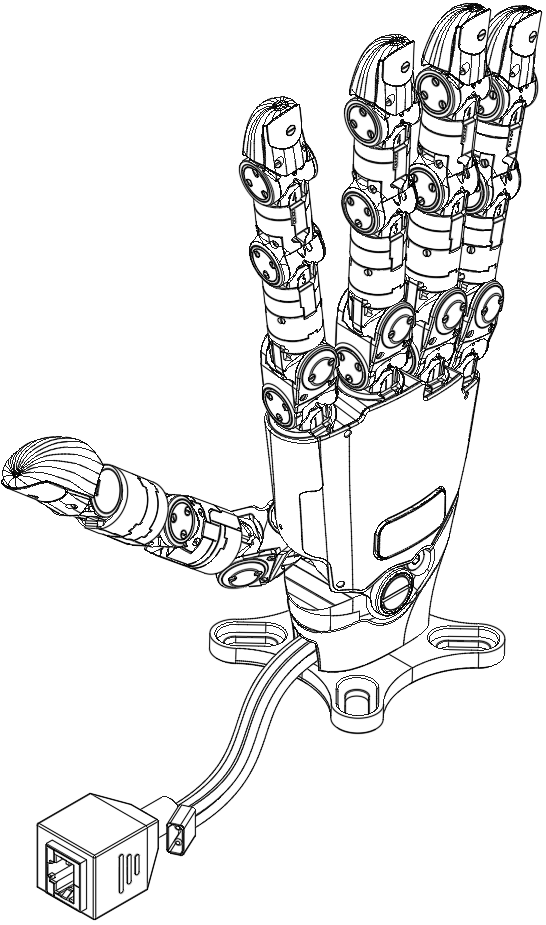
Use the original supplied cables to ensure communication stability and power safety.
In Beta 1, the external interface form will change in later versions (no longer the XT30 + RJ45 two-cable direct layout). Leave room in your integration design.
3.6 Three-Layer Structure: Skeleton, Soft Body, Skin
Wuji Hand 2 has three layers, each handling load-bearing, contact compliance, and surface protection:
| Layer | Name | Role |
|---|---|---|
| Inner | Skeleton | Core mechanical structure that carries the joints, transmission, and motors, and determines whole-hand kinematics and load capacity |
| Middle | Soft body | Biomimetic soft tissue over the skeleton, mimicking the hardness and compression travel of human soft tissue for anthropomorphic contact and cushioning |
| Outer | Skin | Passive protective layer over the soft body that provides surface friction, wear resistance, and appearance protection, with no sensing user-removable and replaceable |
In Beta 1, fingertip soft-body hardness is still being tuned and the skin design isn't finalized. The current prototype's feel, appearance, and soft-body life don't represent the final product.
4. Electrical Characteristics
The pinout uses a standard RJ45 port and supports 100BASE-TX.
5. Package Contents
For the hand body itself—its structure, specifications, and interfaces—see the earlier sections. Besides the hand, the package includes the following:
| Image | Name | Qty | Description |
|---|---|---|---|
 | Power adapter | 1 | Rated 12 V 20 A |
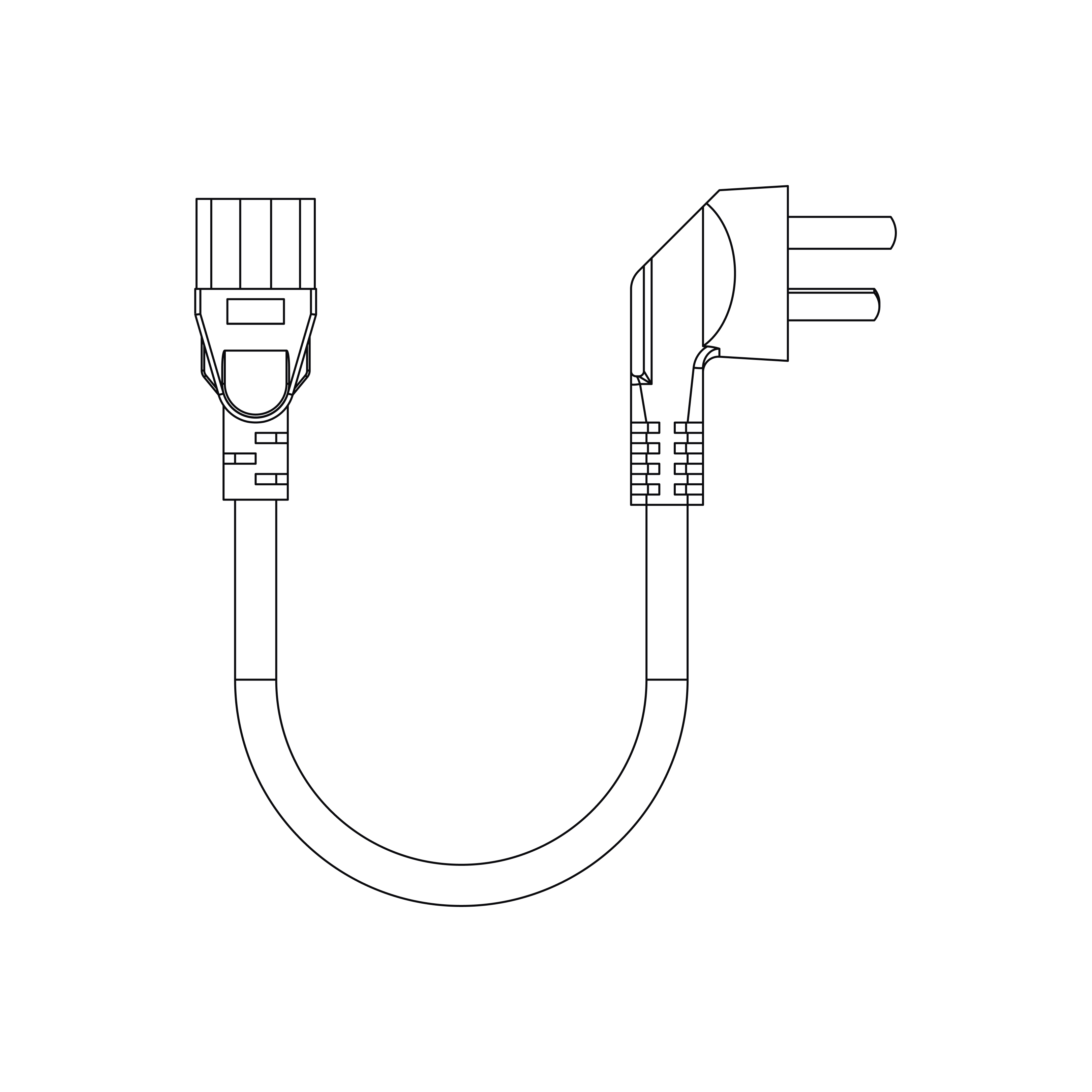 | Power adapter AC cable | 1 | China-standard 3-prong plug |
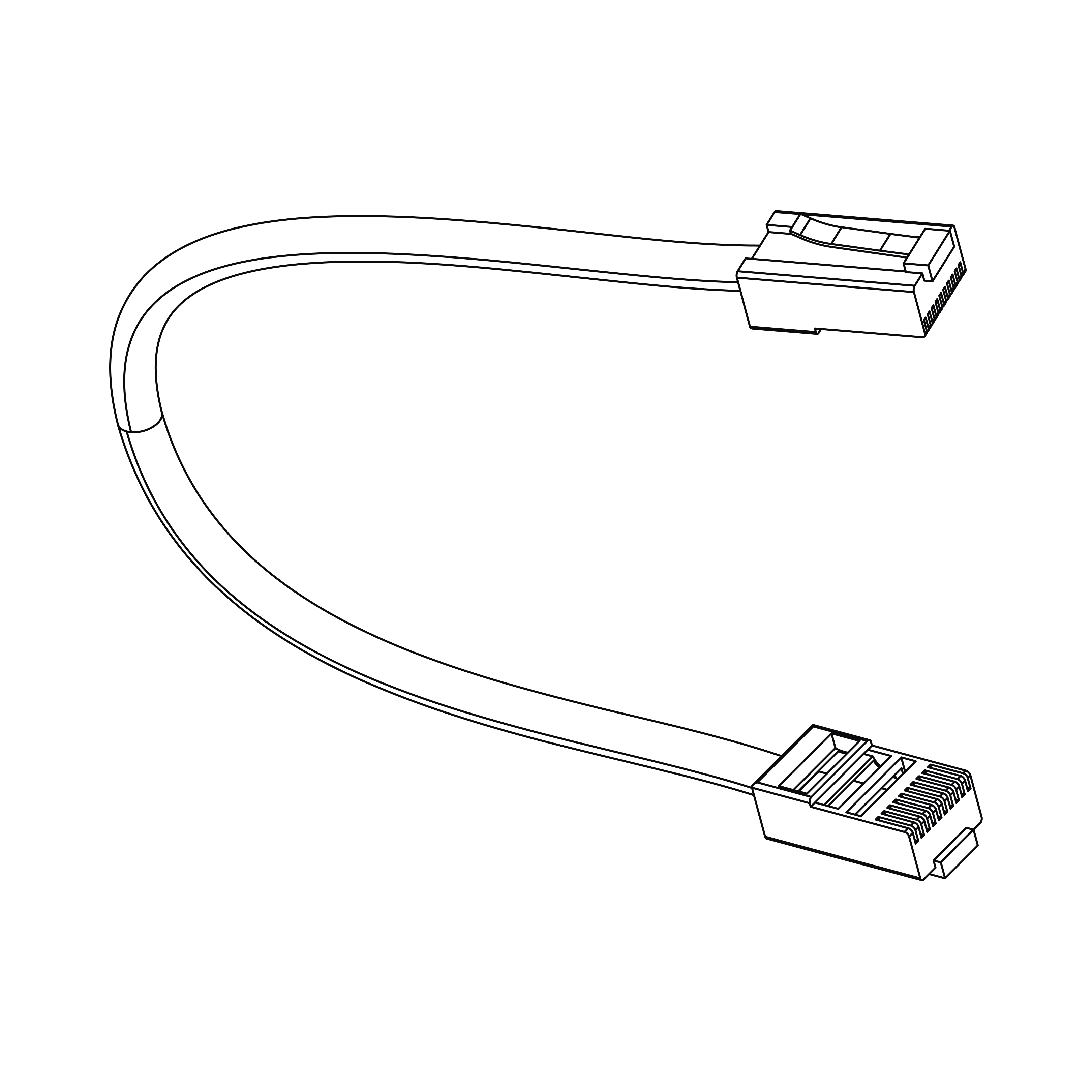 | RJ45 cable | 1 | Shielded Cat5e, 2 m |
 | XT30 male-to-female extension cable | 1 | 14 AWG, 2 m |
 | Adapter mount | 1 | — |
 | Adapter flange | 1 | — |